- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu




ห้องครัว พ่อครัว หุ่นยนต์ทำอาหาร เครื่องทำอาหาร สวิตช์มอเตอร์ฝืน
พารามิเตอร์มอเตอร์
| แรงดันไฟฟ้าที่ใช้งาน | DC300V |
| จัดอันดับปัจจุบัน | 2.8 ± 10% ก |
| กระแสสูงสุด | 5.4A |
| แรงดันไฟฟ้าเริ่มต้น | กระแสตรง23V~25V |
| กำลังไฟพิกัด | 700±10%วัตต์ |
| ความเร็วที่กำหนด | 35,000 ± 10% รอบต่อนาที |
| พลังงานที่ไม่ได้ใช้งาน | <100W |
| จำนวนเสา | 2 |
| แรงบิด | 0.2NM |
| ประสิทธิผล | 80% ± 10% |
| การเปลี่ยน | ตามแนวแกน CW |
| เสียงรบกวน | สูงสุด 96dB,<30ซม |
| น้ำหนัก | 1.68กก |
| การแบก | ลูกปืน 2 ลูก |
| ควบคุม | เซ็นเซอร์ฮอลล์ |
| ติดตั้ง | ติดหน้าแปลน |
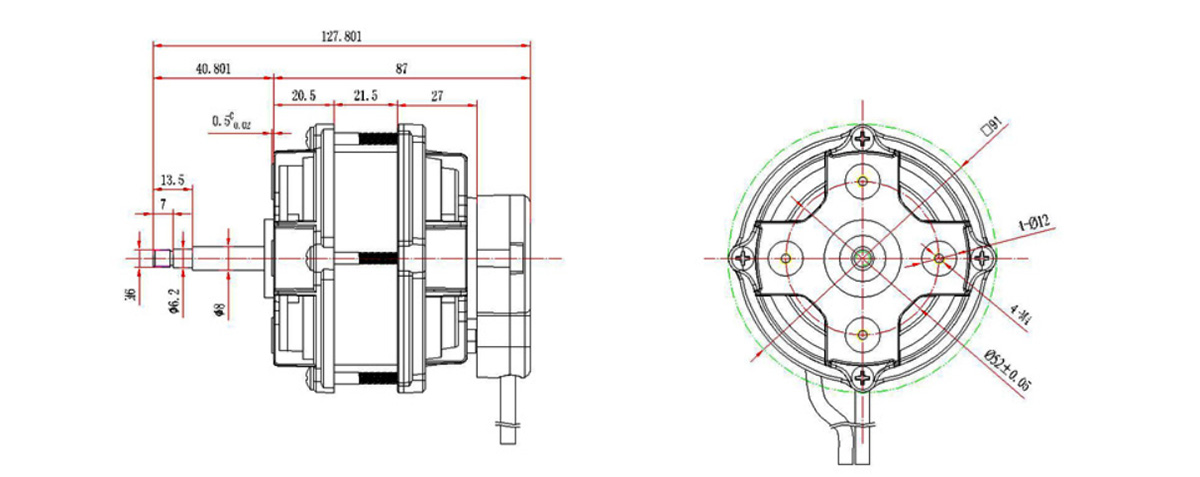
โครงสร้างมอเตอร์
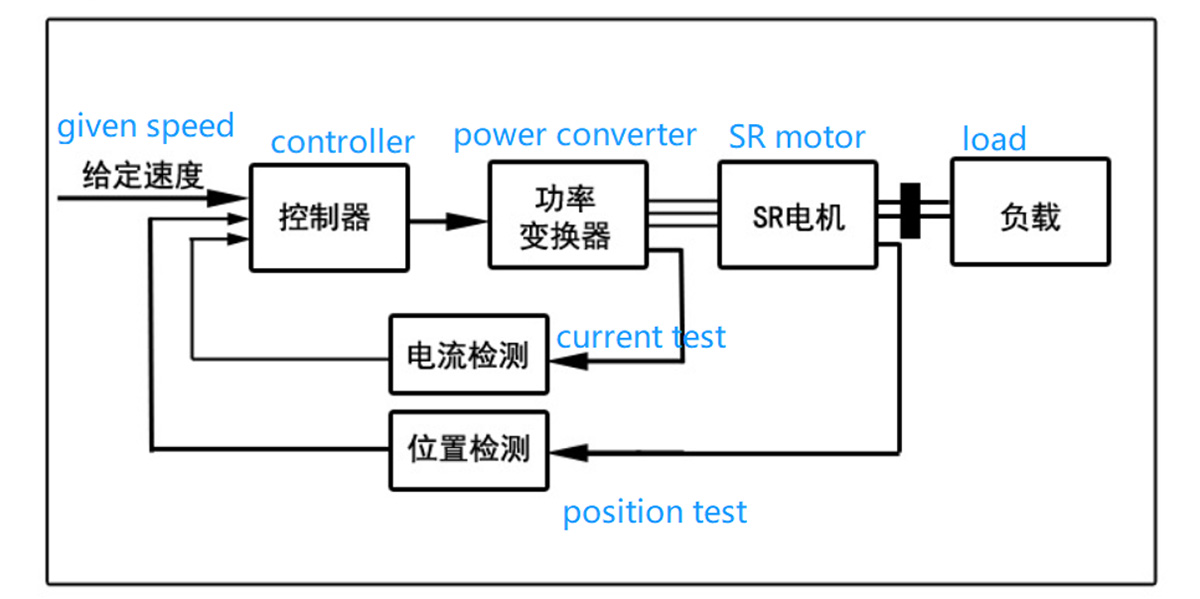
1. องค์ประกอบของระบบขับเคลื่อนมอเตอร์แบบฝืนแบบสลับ
ระบบขับเคลื่อนมอเตอร์แบบฝืนสวิตช์ (SRD) ส่วนใหญ่ประกอบด้วยมอเตอร์แบบฝืนแบบสวิตช์ ตัวแปลงกำลัง ตัวควบคุม และตัวตรวจจับ
2.สลับมอเตอร์ฝืน
มอเตอร์ SR สามารถออกแบบเป็นโครงสร้างเฟสเดียว สองเฟส สามเฟส สี่เฟส และหลายเฟสที่มีหมายเลขเฟสต่างกัน และมีโครงสร้างฟันเดี่ยวต่อเสาและโครงสร้างหลายฟันต่อเสา อากาศตามแนวแกน ช่องว่าง ช่องว่างอากาศในแนวรัศมี และช่องว่างอากาศตามแนวแกน โครงสร้างช่องว่างอากาศแบบไฮบริดเรเดียล โรเตอร์ด้านในและโครงสร้างโรเตอร์ด้านนอก โดยทั่วไปแล้ว มอเตอร์ SR ที่ต่ำกว่า 3 เฟสจะไม่มีความสามารถในการสตาร์ทเอง เฟสจำนวนมากมีประโยชน์ในการลดความผันผวนของแรงบิด แต่จะนำไปสู่โครงสร้างที่ซับซ้อน อุปกรณ์สวิตชิ่งหลักจำนวนมาก และต้นทุนที่เพิ่มขึ้น ปัจจุบันโครงสร้างสองเฟส 6/4 ขั้วและโครงสร้างระดับสี่เฟส 8/6 มีการใช้กันอย่างแพร่หลาย
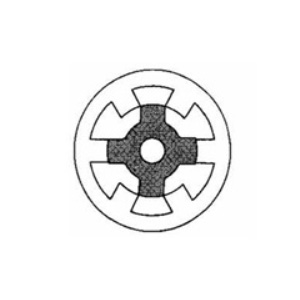
โครงสร้างปกติ 3 เฟส
มอเตอร์ SR โพลาร์ 6/4
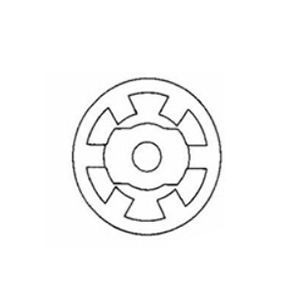
3 เฟส 6/2
มอเตอร์โพลาร์ SR
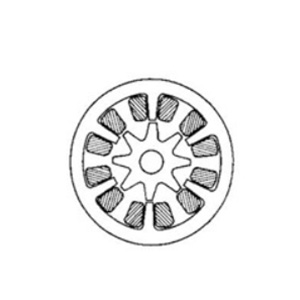
3 เฟส 6/8
มอเตอร์โพลาร์ SR

3 เฟส 12/8
มอเตอร์โพลาร์ SR
3. แผนภาพการเดินสายทางกายภาพของมอเตอร์และไดรเวอร์
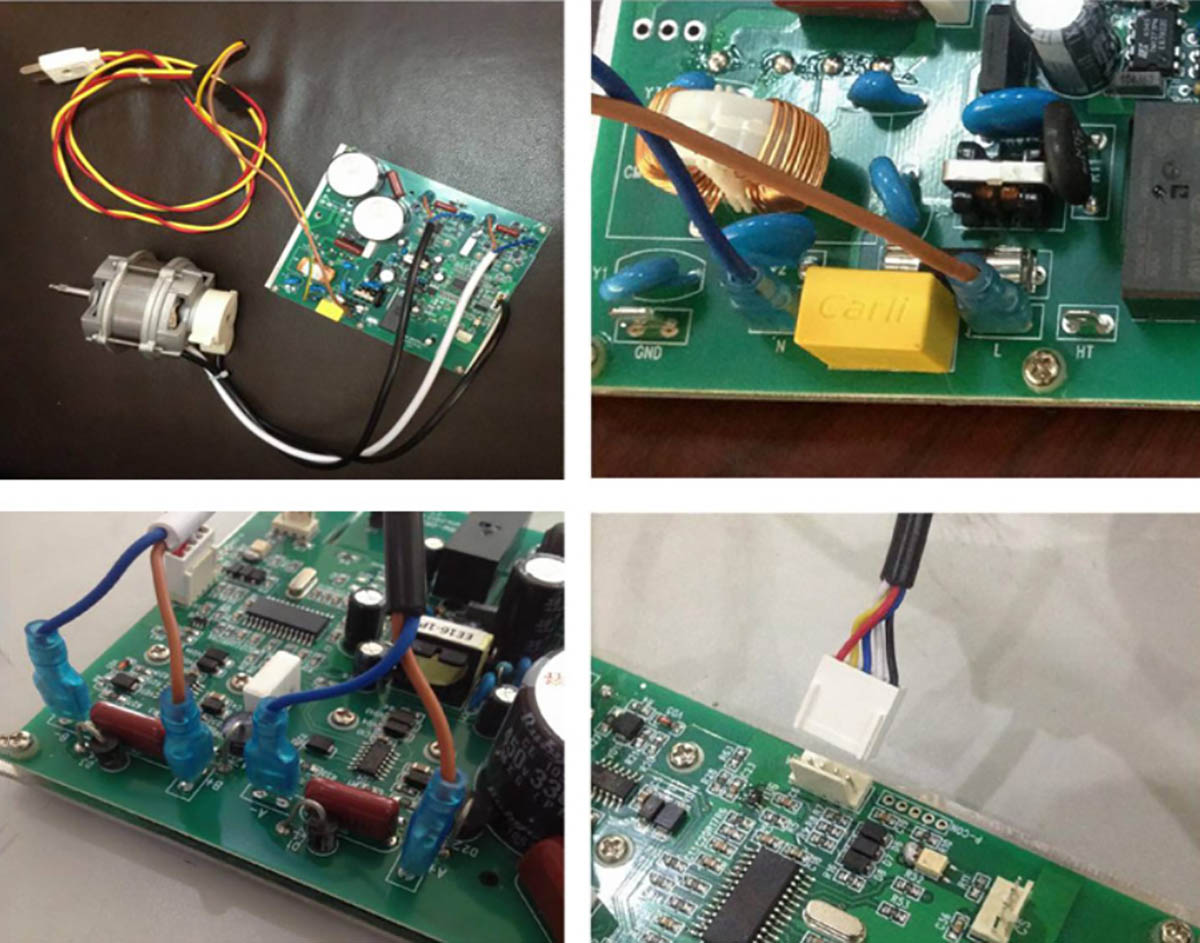
รูปถ่ายสินค้า


การต่อสายไฟเฟสมอเตอร์
สีดำ (สีน้ำตาล /A+ สีน้ำเงิน /A-), สีขาว (สีน้ำตาล /A+ สีน้ำเงิน /A- ), ความยาวสายไฟ L=380 ± 50 มม.
การเดินสายไฟฮอลล์:
สีแดง ( +5V ), สีดำ ( GND), สีเหลือง ( SA ), สีฟ้า ( SB), สีขาว ( SC ), ความยาวสาย L= ความยาวสาย L=380 ± 50 มม.
การจัดเก็บ: 5 ℃ ~ 40 ℃ ความชื้น <90%
ชั้นฉนวน: F
ขดลวดไร้รอยร้าวจะหมุนเป็นเวลา 3 นาทีที่ 130% ของแรงดันไฟฟ้าที่กำหนด
อายุการใช้งาน: 2000 ชั่วโมงภายใต้สภาพการทำงานปกติ
การกระจัดตามแนวแกนควรน้อยกว่า 0.02 มม. เมื่อมอเตอร์ทำงาน
ลักษณะของมอเตอร์
1.ประสิทธิภาพของระบบสูง: ในช่วงการควบคุมความเร็วที่กว้าง ประสิทธิภาพโดยรวมจะสูงกว่าระบบควบคุมความเร็วอื่นๆ อย่างน้อย 10% และประสิทธิภาพสูงจะเห็นได้ชัดเจนกว่าที่ความเร็วต่ำและโหลดที่ไม่ได้รับการจัดอันดับ
2.การควบคุมความเร็วที่หลากหลาย การทำงานระยะยาวที่ความเร็วต่ำ: สามารถทำงานได้ภายใต้โหลดเป็นเวลานานในช่วงตั้งแต่ศูนย์ถึงความเร็วสูงสุด และอุณหภูมิที่เพิ่มขึ้นของมอเตอร์และตัวควบคุมจะต่ำกว่าอุณหภูมิของโหลดที่กำหนด
3.แรงบิดสตาร์ทสูง กระแสสตาร์ทต่ำ: เมื่อแรงบิดสตาร์ทถึง 150% ของแรงบิดที่กำหนด กระแสสตาร์ทจะอยู่ที่ 30% ของกระแสพิกัดเท่านั้น
4. สามารถเริ่มและหยุดบ่อยครั้ง และสลับระหว่างการหมุนไปข้างหน้าและย้อนกลับ: สามารถเริ่มและหยุดบ่อยครั้ง และสลับระหว่างการหมุนไปข้างหน้าและย้อนกลับบ่อยครั้ง เมื่อมีชุดเบรกและกำลังเบรกตรงตามเวลาที่กำหนด การสลับสตาร์ท-หยุดและเดินหน้า-ถอยหลังสามารถทำได้มากกว่า 1,000 ครั้งต่อชั่วโมง
5. ความสามารถในการโอเวอร์โหลดที่แข็งแกร่ง: เมื่อโหลดมีขนาดใหญ่กว่าโหลดที่กำหนดในช่วงเวลาสั้น ๆ ความเร็วจะลดลง กำลังขับสูงสุดจะยังคงอยู่ และจะไม่มีปรากฏการณ์กระแสเกิน เมื่อโหลดกลับสู่สภาวะปกติ ความเร็วจะกลับสู่ความเร็วที่ตั้งไว้
6.ความแข็งแรงทางกลและความน่าเชื่อถือสูงกว่ามอเตอร์ประเภทอื่น โรเตอร์ไม่มีแม่เหล็กถาวรและสามารถมีอุณหภูมิที่เพิ่มขึ้นได้สูงกว่าที่อนุญาต
แอปพลิเคชัน
พัดลมและเครื่องทำอาหาร