Vehiculele electrice sunt compuse în principal din trei părți: sistemul de acționare cu motor, sistemul de baterii și sistemul de control al vehiculului. Sistemul de acționare cu motor este partea care transformă direct energia electrică în energie mecanică, ceea ce determină indicatorii de performanță ai vehiculelor electrice. Prin urmare, alegerea motorului de antrenare este deosebit de importantă.
În mediul protecției mediului, vehiculele electrice au devenit, de asemenea, un punct fierbinte de cercetare în ultimii ani. Vehiculele electrice pot realiza emisii zero sau foarte scăzute în traficul urban și au avantaje uriașe în domeniul protecției mediului. Toate țările lucrează din greu pentru a dezvolta vehicule electrice. Vehiculele electrice sunt compuse în principal din trei părți: sistemul de acționare cu motor, sistemul de baterii și sistemul de control al vehiculului. Sistemul de acționare cu motor este partea care transformă direct energia electrică în energie mecanică, ceea ce determină indicatorii de performanță ai vehiculelor electrice. Prin urmare, alegerea motorului de antrenare este deosebit de importantă.
1. Cerințe pentru vehiculele electrice pentru motoare de tracțiune
În prezent, evaluarea performanței vehiculelor electrice ia în considerare în principal următorii trei indicatori de performanță:
(1) Kilometraj maxim (km): kilometrajul maxim al vehiculului electric după ce bateria este complet încărcată;
(2) Capacitate(e) de accelerare: timpul minim necesar unui vehicul electric pentru a accelera de la oprire la o anumită viteză;
(3) Viteza maximă (km/h): viteza maximă pe care o poate atinge un vehicul electric.
Motoarele proiectate pentru caracteristicile de conducere ale vehiculelor electrice au cerințe speciale de performanță în comparație cu motoarele industriale:
(1) Motorul de antrenare al vehiculului electric necesită de obicei cerințe de performanță dinamică ridicată pentru pornirea/oprirea frecventă, accelerarea/decelerația și controlul cuplului;
(2) Pentru a reduce greutatea întregului vehicul, transmisia cu mai multe viteze este de obicei anulată, ceea ce necesită ca motorul să poată furniza un cuplu mai mare la viteză mică sau atunci când urcă o pantă și, de obicei, poate rezista de 4-5 ori suprasarcina;
(3) Intervalul de reglare a vitezei trebuie să fie cât mai mare posibil și, în același timp, este necesar să se mențină o eficiență ridicată de funcționare în întregul interval de reglare a vitezei;
(4) Motorul este proiectat să aibă o viteză nominală ridicată cât mai mult posibil și, în același timp, se folosește o carcasă din aliaj de aluminiu pe cât posibil. Motorul de mare viteză este de dimensiuni mici, ceea ce conduce la reducerea greutății vehiculelor electrice;
(5) Vehiculele electrice ar trebui să aibă o utilizare optimă a energiei și să aibă funcția de recuperare a energiei de frânare. Energia recuperată prin frânarea regenerativă ar trebui să atingă în general 10%-20% din energia totală;
(6) Mediul de lucru al motorului utilizat în vehiculele electrice este mai complex și dur, necesitând ca motorul să aibă o bună fiabilitate și adaptabilitate la mediu și, în același timp, să se asigure că costul producției de motoare nu poate fi prea mare.
2. Mai multe motoare de antrenare utilizate în mod obișnuit
2.1 Motor DC
În stadiul incipient al dezvoltării vehiculelor electrice, majoritatea vehiculelor electrice foloseau motoare cu curent continuu ca motoare de antrenare. Acest tip de tehnologie a motorului este relativ matur, cu metode de control ușoare și reglare excelentă a vitezei. Pe vremuri a fost cel mai utilizat în domeniul motoarelor de reglare a vitezei. . Cu toate acestea, datorită structurii mecanice complexe a motorului de curent continuu, cum ar fi: perii și comutatoare mecanice, capacitatea sa de suprasarcină instantanee și creșterea în continuare a vitezei motorului sunt limitate, iar în cazul lucrului pe termen lung, structura mecanică a motorul va fi Se generează pierderi și costurile de întreținere cresc. În plus, când motorul funcționează, scânteile de la perii fac rotorul să se încălzească, risipă energie, îngreunează disiparea căldurii și provoacă interferențe electromagnetice de înaltă frecvență, care afectează performanța vehiculului. Datorită deficiențelor de mai sus ale motoarelor cu curent continuu, vehiculele electrice actuale au eliminat practic motoarele cu curent continuu.
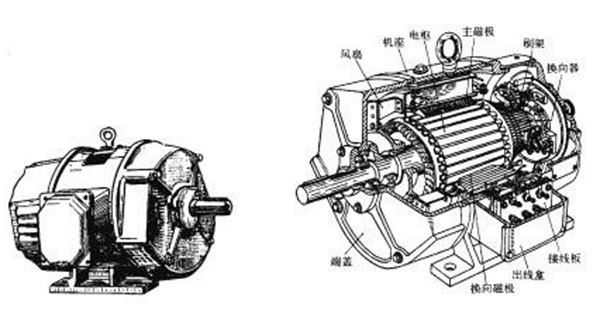
2.2 Motor asincron AC
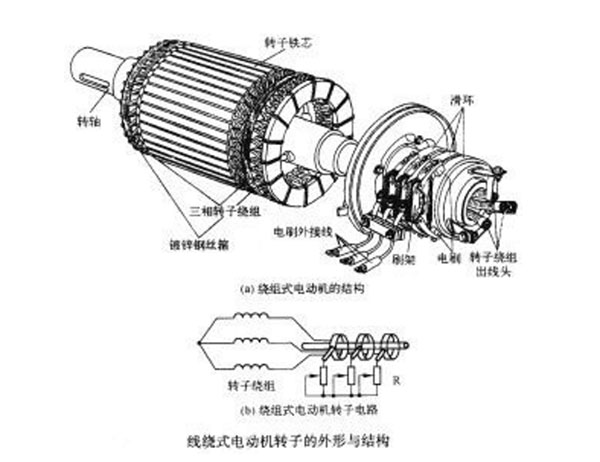
Motorul asincron AC este un tip de motor utilizat pe scară largă în industrie. Se caracterizează prin aceea că statorul și rotorul sunt laminate cu foi de oțel siliconic. Ambele capete sunt ambalate cu capace din aluminiu. , funcționare fiabilă și durabilă, întreținere ușoară. În comparație cu motorul de curent continuu de aceeași putere, motorul asincron de curent alternativ este mai eficient, iar masa este cu aproximativ o jumătate mai ușoară. Dacă se adoptă metoda de control al controlului vectorial, se poate obține controlabilitatea și domeniul de reglare a vitezei mai larg comparabil cu cel al motorului de curent continuu. Datorită avantajelor de înaltă eficiență, putere specifică mare și adecvare pentru funcționarea la viteză mare, motoarele asincrone cu curent alternativ sunt cele mai utilizate motoare în vehiculele electrice de mare putere. În prezent, motoarele asincrone cu curent alternativ au fost produse pe scară largă și există diferite tipuri de produse mature din care să alegeți. Cu toate acestea, în cazul funcționării la viteză mare, rotorul motorului este serios încălzit, iar motorul trebuie răcit în timpul funcționării. În același timp, sistemul de acționare și control al motorului asincron este foarte complicat, iar costul corpului motorului este, de asemenea, ridicat. În comparație cu motorul cu magnet permanent și reticența comutată Pentru motoare, eficiența și densitatea de putere a motoarelor asincrone sunt scăzute, ceea ce nu este propice pentru îmbunătățirea kilometrajului maxim al vehiculelor electrice.
2.3 Motor cu magnet permanent
Motoarele cu magnet permanenți pot fi împărțite în două tipuri în funcție de diferitele forme de undă ale înfășurărilor statorului, unul este un motor DC fără perii, care are un curent de undă de impuls dreptunghiular; celălalt este un motor sincron cu magnet permanent, care are un curent sinusoid. Cele două tipuri de motoare sunt practic aceleași ca structură și principiu de funcționare. Rotoarele sunt magneți permanenți, ceea ce reduce pierderile cauzate de excitație. Statorul este instalat cu înfășurări pentru a genera cuplu prin curent alternativ, astfel încât răcirea este relativ ușoară. Deoarece acest tip de motor nu trebuie să instaleze perii și o structură de comutație mecanică, nu vor fi generate scântei de comutație în timpul funcționării, funcționarea este sigură și fiabilă, întreținerea este convenabilă și rata de utilizare a energiei este ridicată.
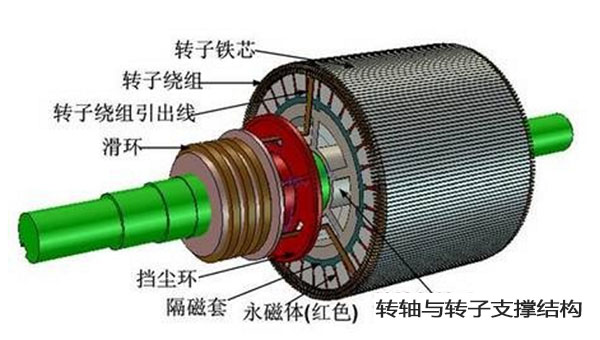
Sistemul de control al motorului cu magnet permanent este mai simplu decât sistemul de control al motorului asincron AC. Cu toate acestea, din cauza limitării procesului de material cu magnet permanent, domeniul de putere al motorului cu magnet permanent este mic, iar puterea maximă este în general de numai zeci de milioane, ceea ce este cel mai mare dezavantaj al motorului cu magnet permanent. În același timp, materialul cu magnet permanent de pe rotor va avea un fenomen de dezintegrare magnetică în condiții de temperatură ridicată, vibrații și supracurent, astfel încât în condiții de lucru relativ complexe, motorul cu magnet permanent este predispus la deteriorare. Mai mult, prețul materialelor cu magnet permanenți este mare, astfel încât costul întregului motor și al sistemului de control al acestuia este ridicat.
2.4 Motor cu reluctanță comutat
Ca un nou tip de motor, motorul cu reluctanță comutată are cea mai simplă structură în comparație cu alte tipuri de motoare de antrenare. Statorul și rotorul sunt ambele structuri duble proeminente realizate din foi obișnuite de oțel siliconic. Nu există nicio structură pe rotor. Statorul este echipat cu o înfășurare concentrată simplă, care are multe avantaje, cum ar fi structură simplă și solidă, fiabilitate ridicată, greutate redusă, cost redus, eficiență ridicată, creștere scăzută a temperaturii și întreținere ușoară. În plus, are caracteristicile excelente de control al sistemului de control al vitezei DC și este potrivit pentru medii dure și este foarte potrivit pentru utilizare ca motor de antrenare pentru vehicule electrice.

Având în vedere că motoarele de antrenare a vehiculelor electrice, motoarele cu curent continuu și motoarele cu magnet permanenți au o adaptabilitate slabă în structură și mediu de lucru complex și sunt predispuse la defecțiuni mecanice și de demagnetizare, această lucrare se concentrează pe introducerea motoarelor cu reluctanță comutată și a motoarelor asincrone cu curent alternativ. În comparație cu mașina, are avantaje evidente în următoarele aspecte.
2.4.1 Structura corpului motorului
Structura motorului cu reluctanță comutată este mai simplă decât cea a motorului cu inducție cu veveriță. Avantajul său remarcabil este că nu există înfășurare pe rotor și este realizat doar din foi obișnuite de oțel siliconic. Cea mai mare parte a pierderii întregului motor este concentrată pe înfășurarea statorului, ceea ce face motorul simplu de fabricat, are o izolație bună, este ușor de răcit și are caracteristici excelente de disipare a căldurii. Această structură a motorului poate reduce dimensiunea și greutatea motorului și poate fi obținută cu un volum mic. putere de ieșire mai mare. Datorită elasticității mecanice bune a rotorului motorului, motoarele cu reluctanță comutată pot fi utilizate pentru funcționarea la viteză foarte mare.
2.4.2 Circuitul de antrenare a motorului
Curentul de fază al sistemului de acționare a motorului cu reluctitate comutată este unidirecțional și nu are nimic de-a face cu direcția cuplului, iar un singur dispozitiv de comutare principal poate fi utilizat pentru a îndeplini starea de funcționare în patru cadrane a motorului. Circuitul convertorului de putere este conectat direct în serie cu înfășurarea de excitație a motorului, iar fiecare circuit de fază furnizează energie independent. Chiar dacă o anumită înfășurare de fază sau controlerul motorului eșuează, trebuie doar să oprească funcționarea fazei fără a provoca un impact mai mare. Prin urmare, atât corpul motorului, cât și convertizorul de putere sunt foarte sigure și fiabile, astfel încât sunt mai potrivite pentru utilizare în medii dure decât mașinile asincrone.
2.4.3 Aspecte de performanță ale sistemului motor
Motoarele cu reluctanță comutată au mulți parametri de control și este ușor de îndeplinit cerințele de funcționare în patru cadrane a vehiculelor electrice prin strategii de control adecvate și proiectare a sistemului și pot menține o capacitate excelentă de frânare în zonele de operare de mare viteză. Motoarele cu reluctanță comutată nu numai că au o eficiență ridicată, dar mențin și o eficiență ridicată într-o gamă largă de reglare a vitezei, care este de neegalat de alte tipuri de sisteme de acționare a motorului. Această performanță este foarte potrivită pentru funcționarea vehiculelor electrice și este foarte benefică pentru îmbunătățirea autonomiei de croazieră a vehiculelor electrice.
3. Concluzie
Accentul acestei lucrări este de a prezenta avantajele motorului cu reluctanță comutată ca motor de antrenare pentru vehicule electrice prin compararea diferitelor sisteme de control al vitezei motorului de acționare utilizate în mod obișnuit, care este un punct fierbinte de cercetare în dezvoltarea vehiculelor electrice. Pentru acest tip de motor special, există încă mult spațiu pentru dezvoltare în aplicații practice. Cercetătorii trebuie să depună mai multe eforturi pentru a efectua cercetări teoretice și, în același timp, este necesară combinarea nevoilor pieței pentru a promova aplicarea acestui tip de motor în practică.
Ora postării: 24-mar-2022