Os veículos elétricos são compostos principalmente de três partes: sistema de acionamento motorizado, sistema de bateria e sistema de controle do veículo. O sistema de acionamento do motor é a parte que converte diretamente a energia elétrica em energia mecânica, o que determina os indicadores de desempenho dos veículos elétricos. Portanto, a seleção do motor de acionamento é particularmente importante.
No ambiente de proteção ambiental, os veículos elétricos também se tornaram um ponto importante de pesquisa nos últimos anos. Os veículos eléctricos podem atingir zero ou muito baixas emissões no tráfego urbano e apresentam enormes vantagens no domínio da protecção ambiental. Todos os países estão a trabalhar arduamente para desenvolver veículos eléctricos. Os veículos elétricos são compostos principalmente de três partes: sistema de acionamento motorizado, sistema de bateria e sistema de controle do veículo. O sistema de acionamento do motor é a parte que converte diretamente a energia elétrica em energia mecânica, o que determina os indicadores de desempenho dos veículos elétricos. Portanto, a seleção do motor de acionamento é particularmente importante.
1. Requisitos para veículos elétricos para motores de acionamento
Actualmente, a avaliação do desempenho dos veículos eléctricos considera principalmente os seguintes três indicadores de desempenho:
(1) Quilometragem máxima (km): quilometragem máxima do veículo elétrico após a bateria estar totalmente carregada;
(2) Capacidade(s) de aceleração: o tempo mínimo necessário para um veículo elétrico acelerar desde a paralisação até uma determinada velocidade;
(3) Velocidade máxima (km/h): a velocidade máxima que um veículo elétrico pode atingir.
Os motores projetados para as características de condução de veículos elétricos possuem requisitos especiais de desempenho em comparação com os motores industriais:
(1) O motor de acionamento do veículo elétrico geralmente requer altos requisitos de desempenho dinâmico para partidas/paradas frequentes, aceleração/desaceleração e controle de torque;
(2) Para reduzir o peso de todo o veículo, a transmissão multivelocidade geralmente é cancelada, o que exige que o motor possa fornecer um torque maior em baixa velocidade ou ao subir uma ladeira, e geralmente pode suportar 4-5 vezes a sobrecarga;
(3) A faixa de regulação de velocidade deve ser a maior possível e, ao mesmo tempo, é necessário manter uma alta eficiência operacional em toda a faixa de regulação de velocidade;
(4) O motor é projetado para ter uma velocidade nominal tão alta quanto possível e, ao mesmo tempo, uma carcaça de liga de alumínio é usada tanto quanto possível. O motor de alta velocidade é pequeno, o que contribui para reduzir o peso dos veículos elétricos;
(5) Os veículos eléctricos devem ter uma utilização óptima de energia e ter a função de recuperação de energia de travagem. A energia recuperada pela travagem regenerativa deve geralmente atingir 10%-20% da energia total;
(6) O ambiente de trabalho do motor utilizado nos veículos eléctricos é mais complexo e severo, exigindo que o motor tenha boa fiabilidade e adaptabilidade ambiental, e ao mesmo tempo que garanta que o custo de produção do motor não pode ser demasiado elevado.
2. Vários motores de acionamento comumente usados
2.1 Motor CC
Na fase inicial do desenvolvimento dos veículos elétricos, a maioria dos veículos elétricos utilizava motores DC como motores de acionamento. Este tipo de tecnologia de motor é relativamente madura, com métodos de controle fáceis e excelente regulação de velocidade. Costumava ser o mais utilizado na área de motores de regulação de velocidade. . Porém, devido à complexa estrutura mecânica do motor DC, tais como: escovas e comutadores mecânicos, sua capacidade de sobrecarga instantânea e o aumento adicional da velocidade do motor são limitados, e no caso de trabalho de longo prazo, a estrutura mecânica do o motor será Gerado perda e os custos de manutenção serão aumentados. Além disso, quando o motor está funcionando, as faíscas das escovas aquecem o rotor, desperdiçam energia, dificultam a dissipação do calor e também causam interferência eletromagnética de alta frequência, que afeta o desempenho do veículo. Devido às deficiências acima dos motores DC, os veículos elétricos atuais basicamente eliminaram os motores DC.
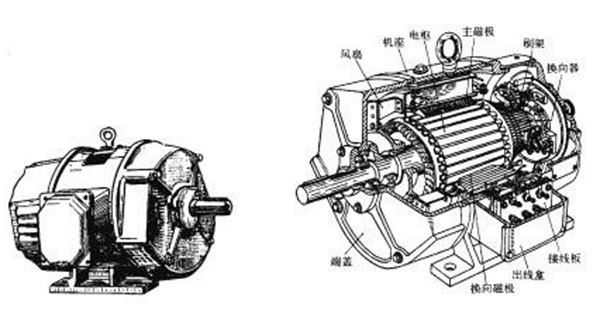
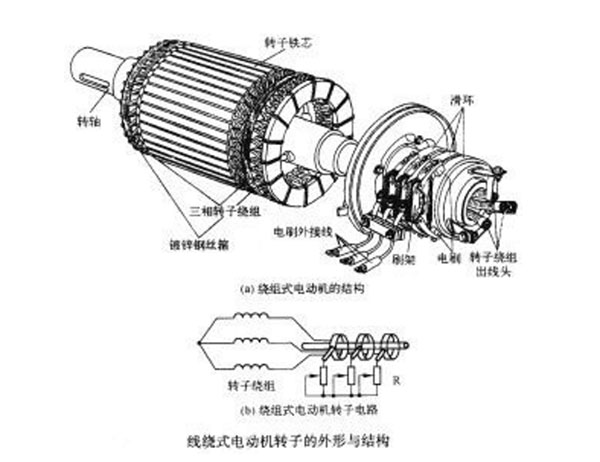
2.2 Motor assíncrono CA
O motor assíncrono CA é um tipo de motor amplamente utilizado na indústria. Caracteriza-se pelo fato de o estator e o rotor serem laminados com chapas de aço silício. Ambas as extremidades são embaladas com tampas de alumínio. , operação confiável e durável, fácil manutenção. Comparado com o motor DC da mesma potência, o motor assíncrono AC é mais eficiente e a massa é cerca de metade mais leve. Se o método de controle vetorial for adotado, a controlabilidade e uma faixa de regulação de velocidade mais ampla comparável à do motor DC podem ser obtidas. Devido às vantagens de alta eficiência, alta potência específica e adequação para operação em alta velocidade, os motores assíncronos CA são os motores mais utilizados em veículos elétricos de alta potência. Atualmente, os motores assíncronos CA têm sido produzidos em larga escala e existem vários tipos de produtos maduros para você escolher. Porém, no caso de operação em alta velocidade, o rotor do motor fica seriamente aquecido e o motor deve ser resfriado durante a operação. Ao mesmo tempo, o sistema de acionamento e controle do motor assíncrono é muito complicado e o custo do corpo do motor também é alto. Em comparação com o motor de ímã permanente e a relutância comutada Para motores, a eficiência e a densidade de potência dos motores assíncronos são baixas, o que não contribui para melhorar a quilometragem máxima dos veículos elétricos.
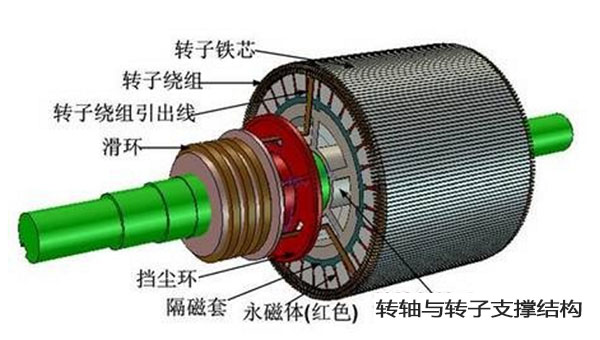
2.3 Motor de ímã permanente
Os motores de ímã permanente podem ser divididos em dois tipos de acordo com as diferentes formas de onda de corrente dos enrolamentos do estator: um é um motor DC sem escova, que possui uma corrente de onda de pulso retangular; o outro é um motor síncrono de ímã permanente, que possui uma corrente de onda senoidal. Os dois tipos de motores são basicamente iguais em estrutura e princípio de funcionamento. Os rotores são ímãs permanentes, o que reduz as perdas causadas pela excitação. O estator é instalado com enrolamentos para gerar torque através de corrente alternada, portanto o resfriamento é relativamente fácil. Como este tipo de motor não necessita de instalação de escovas e estrutura de comutação mecânica, nenhuma faísca de comutação será gerada durante a operação, a operação é segura e confiável, a manutenção é conveniente e a taxa de utilização de energia é alta.
O sistema de controle do motor de ímã permanente é mais simples que o sistema de controle do motor assíncrono CA. No entanto, devido à limitação do processo de material de ímã permanente, a faixa de potência do motor de ímã permanente é pequena e a potência máxima geralmente é de apenas dezenas de milhões, o que é a maior desvantagem do motor de ímã permanente. Ao mesmo tempo, o material do ímã permanente no rotor terá um fenômeno de decaimento magnético sob condições de alta temperatura, vibração e sobrecorrente, portanto, sob condições de trabalho relativamente complexas, o motor de ímã permanente está sujeito a danos. Além disso, o preço dos materiais de ímã permanente é alto, portanto o custo de todo o motor e de seu sistema de controle é alto.
2.4 Motor de relutância comutada
Como um novo tipo de motor, o motor de relutância comutada possui a estrutura mais simples em comparação com outros tipos de motores de acionamento. O estator e o rotor são estruturas duplas salientes feitas de chapas de aço silício comuns. Não há estrutura no rotor. O estator é equipado com um enrolamento concentrado simples, que apresenta muitas vantagens como estrutura simples e sólida, alta confiabilidade, peso leve, baixo custo, alta eficiência, baixo aumento de temperatura e fácil manutenção. Além disso, possui excelentes características de boa controlabilidade do sistema de controle de velocidade DC, é adequado para ambientes agressivos e é muito adequado para uso como motor de acionamento para veículos elétricos.

Considerando que, assim como os motores de acionamento de veículos elétricos, os motores CC e os motores de ímã permanente apresentam baixa adaptabilidade na estrutura e no ambiente de trabalho complexo, e são propensos a falhas mecânicas e de desmagnetização, este artigo concentra-se na introdução de motores de relutância comutada e motores assíncronos CA. Comparado com a máquina, tem vantagens óbvias nos seguintes aspectos.
2.4.1 A estrutura do corpo do motor
A estrutura do motor de relutância comutada é mais simples que a do motor de indução tipo gaiola de esquilo. Sua grande vantagem é que não há enrolamento no rotor e ele é feito apenas de chapas de aço silício comuns. A maior parte da perda de todo o motor está concentrada no enrolamento do estator, o que torna o motor simples de fabricar, possui bom isolamento, é fácil de resfriar e possui excelentes características de dissipação de calor. Esta estrutura do motor pode reduzir o tamanho e o peso do motor, podendo ser obtida com um pequeno volume. maior potência de saída. Devido à boa elasticidade mecânica do rotor do motor, motores de relutância comutada podem ser usados para operação em velocidade ultra-alta.
2.4.2 Circuito de acionamento do motor
A corrente de fase do sistema de acionamento do motor de relutância comutada é unidirecional e não tem nada a ver com a direção do torque, e apenas um dispositivo de comutação principal pode ser usado para atender ao estado de operação de quatro quadrantes do motor. O circuito conversor de energia é conectado diretamente em série com o enrolamento de excitação do motor, e cada circuito de fase fornece energia de forma independente. Mesmo que um determinado enrolamento de fase ou o controlador do motor falhe, basta interromper o funcionamento da fase sem causar maior impacto. Portanto, tanto o corpo do motor quanto o conversor de potência são muito seguros e confiáveis, sendo mais adequados para uso em ambientes agressivos do que máquinas assíncronas.
2.4.3 Aspectos de desempenho do sistema motor
Os motores de relutância comutados têm muitos parâmetros de controle e são fáceis de atender aos requisitos de operação em quatro quadrantes de veículos elétricos por meio de estratégias de controle e design de sistema apropriados, e podem manter excelente capacidade de frenagem em áreas de operação de alta velocidade. Os motores de relutância comutada não apenas apresentam alta eficiência, mas também mantêm alta eficiência em uma ampla faixa de regulação de velocidade, o que é incomparável a outros tipos de sistemas de acionamento de motor. Este desempenho é muito adequado para a operação de veículos elétricos e é muito benéfico para melhorar a autonomia de cruzeiro dos veículos elétricos.
3. Conclusão
O foco deste artigo é apresentar as vantagens do motor de relutância chaveado como motor de acionamento para veículos elétricos, comparando vários sistemas de controle de velocidade do motor de acionamento comumente usados, que é um ponto importante de pesquisa no desenvolvimento de veículos elétricos. Para este tipo de motor especial ainda há muito espaço para desenvolvimento em aplicações práticas. Os pesquisadores precisam se esforçar mais para realizar pesquisas teóricas e, ao mesmo tempo, é preciso combinar as necessidades do mercado para promover a aplicação desse tipo de motor na prática.
Horário da postagem: 24 de março de 2022