- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu




Chef de cozinha robô de cozinha máquina de cozinhar motor de relutância comutado
Parâmetros do motor
| Tensão operacional | CC300V |
| Corrente nominal | 2,8±10%A |
| Corrente máxima | 5.4A |
| Tensão inicial | DC23V~25V |
| potência nominal | 700±10%W |
| Velocidade nominal | 35.000 ± 10% RPM |
| Energia ociosa | <100 W |
| número de pólos | 2 |
| torque | 0,2 nm |
| eficácia | 80%±10% |
| comutação | CW axial |
| barulho | 96dB MÁX.,<30cm |
| peso | 1,68kg |
| consequência | 2 rolamentos de esferas |
| controlar | Sensor Hall |
| Instalar | montagem em flange |
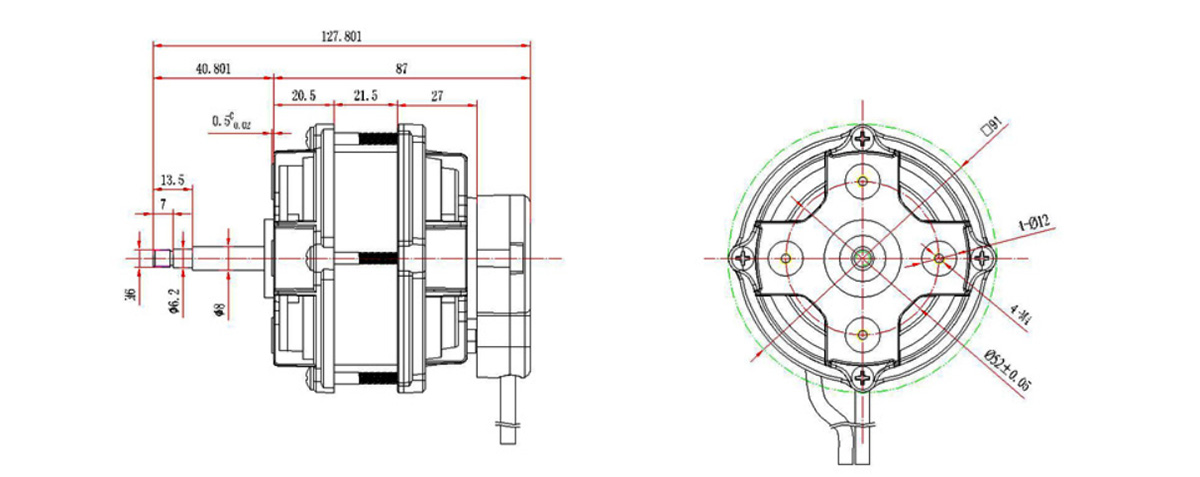
Estrutura Motora
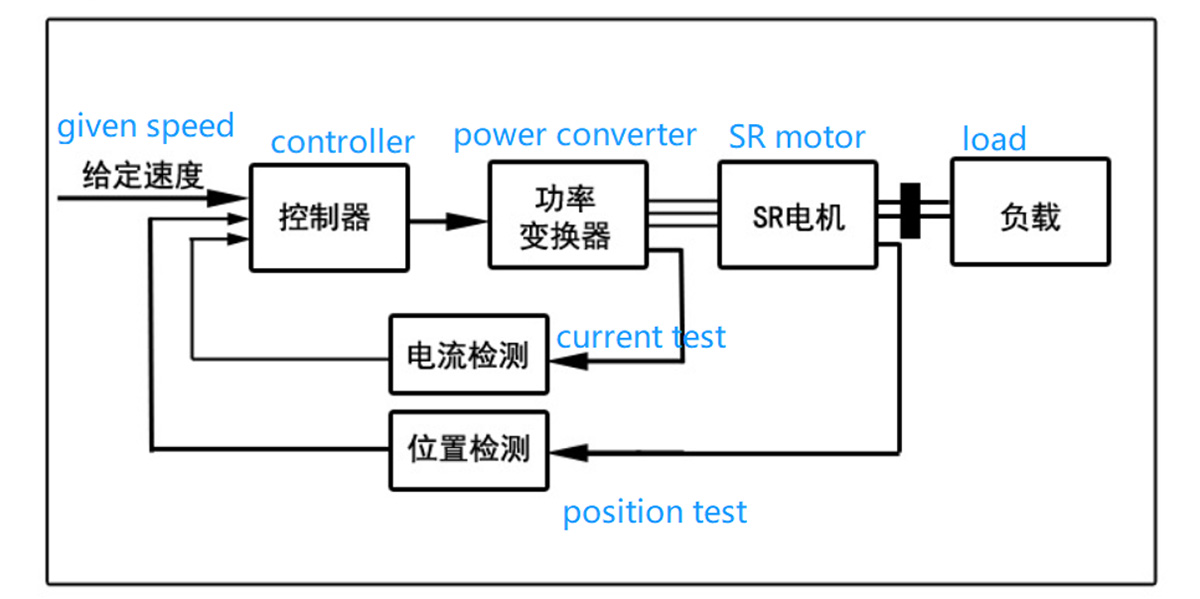
1. A composição do sistema de acionamento do motor de relutância comutada
O sistema de acionamento por motor de relutância comutada (SRD) é composto principalmente por motor de relutância comutada, conversor de potência, controlador e detector.
2.Motor de relutância comutado
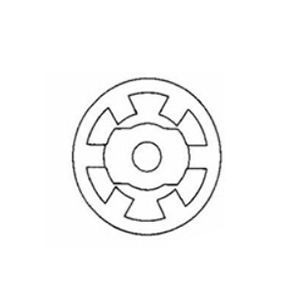
Os motores SR podem ser projetados em estruturas monofásicas, bifásicas, trifásicas, quadrifásicas e multifásicas com diferentes números de fase, e há estrutura de dente único por pólo e estrutura multidente por pólo, ar axial entreferro, entreferro radial e entreferro axial. Uma estrutura de entreferro híbrida radial, rotor interno e estrutura de rotor externo, os motores SR abaixo de trifásicos geralmente não têm capacidade de partida automática. Um grande número de fases é benéfico para reduzir a flutuação de torque, mas leva a uma estrutura complexa, muitos dispositivos de comutação principais e aumento de custo. Atualmente, a estrutura bifásica de 6/4 pólos e a estrutura quadrifásica de 8/6 níveis são amplamente utilizadas.
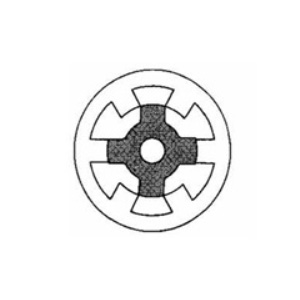
Estrutura regular trifásica
Motor SR 6/4 polar
Trifásico 6/2
motor SR polar
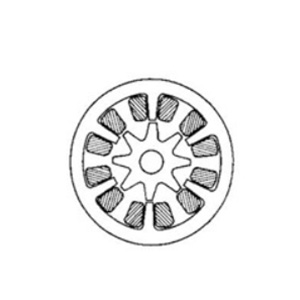
Trifásico 6/8
motor SR polar

Trifásico 12/8
motor SR polar
3. Diagrama de fiação física do motor e do driver
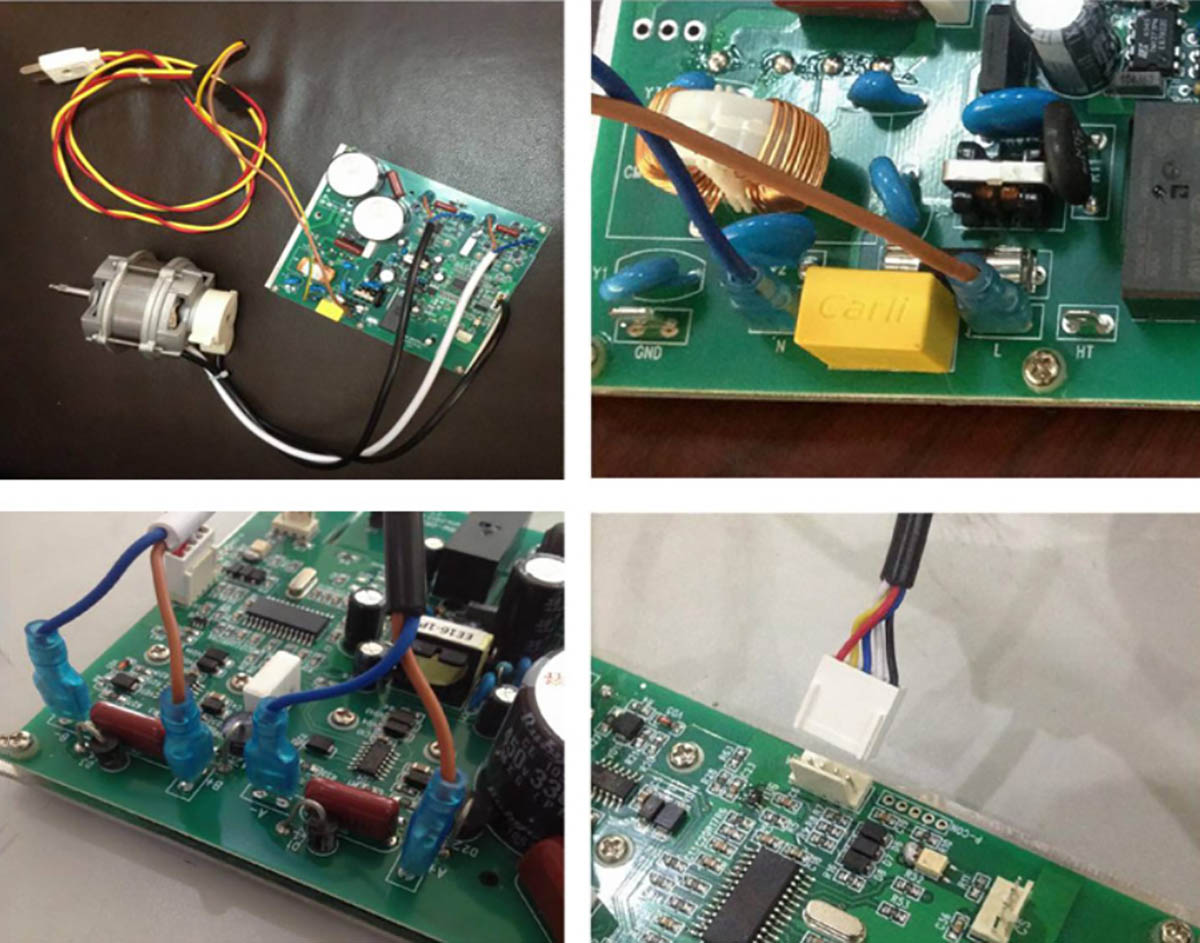
Foto do produto


Fiação das fases do motor
Preto (Marrom /A+ Azul /A-), Branco (Marrom /A+ Azul /A-), comprimento do fio L=380 ± 50mm
Fiação do fio do corredor:
Vermelho (+5V), preto (GND), amarelo (SA), azul (SB), branco (SC), comprimento da linha L= comprimento da linha L=380 ± 50mm
Armazenamento: 5 ℃ ~ 40 ℃, umidade <90%
Classe de isolamento: F
A bobina sem trincas gira por 3 minutos a 130% da tensão nominal.
Vida útil: 2.000 horas em condições normais de trabalho.
O deslocamento axial deve ser inferior a 0,02 mm quando o motor estiver funcionando.
Características do motor
1.Alta eficiência do sistema: Em sua ampla faixa de regulação de velocidade, a eficiência geral é pelo menos 10% maior do que outros sistemas de regulação de velocidade, e a alta eficiência é mais óbvia em baixa velocidade e carga não nominal.
2.Ampla faixa de regulação de velocidade, operação de longo prazo em baixa velocidade: pode funcionar sob carga por um longo tempo na faixa de zero à velocidade máxima, e o aumento de temperatura do motor e do controlador é menor que o da carga nominal.
3.Alto torque de partida, baixa corrente de partida: quando o torque de partida atinge 150% do torque nominal, a corrente de partida é de apenas 30% da corrente nominal.
4. Ele pode iniciar e parar com frequência e alternar entre rotação direta e reversa: pode iniciar e parar com frequência e alternar entre rotação direta e reversa com frequência. Quando há uma unidade de frenagem e a potência de frenagem atende ao requisito de tempo, a comutação start-stop e avanço-reverso pode atingir mais de 1.000 vezes por hora.
5. Forte capacidade de sobrecarga: quando a carga for muito maior que a carga nominal por um curto período de tempo, a velocidade cairá, a potência máxima de saída será mantida e não haverá fenômeno de sobrecorrente. Quando a carga volta ao normal, a velocidade volta à velocidade definida.
6.A resistência mecânica e a confiabilidade são superiores às de outros tipos de motores. O rotor não possui ímãs permanentes e pode ter um aumento de temperatura permitido maior.
Aplicativo
Ventilador e máquina de cozinhar
Categorias de produtos
-

Motor 10kw 96V AC e conjunto de controlador para g ...
-

Motor de relutância chaveado usado em novos co...
-

10kw 72v AC Motor Elétrico Carro Conversão K...
-

Peças de motor síncrono elétrico 1,2k 32V AC para ...
-
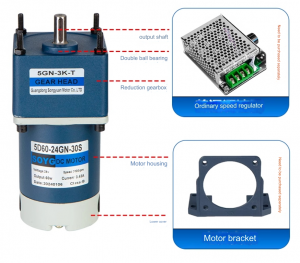
Motor de redução 5D60-24GU-30S 12v24v DC
-

Peças de motor síncrono elétrico 1,2k 32V AC para ...