
Miniaturowy motoreduktor prądowy serii PX
Przegląd
Miniaturowe motoreduktory prądu stałego serii J-SZ(ZYT)-PX składają się odpowiednio z silników prądu stałego serii SZ(ZYT) i zwykłych precyzyjnych reduktorów planetarnych typu PX i są wyposażone w zasilacz, który może realizować płynną regulację prędkości. Szeroki zakres regulacji, mały rozmiar, niewielka waga, wysoka wydajność, zwarta konstrukcja, duży wyjściowy moment obrotowy, szeroko stosowane w napędach wymagających niskiej prędkości, wysokiego momentu obrotowego i bezstopniowej regulacji prędkości. Bezstopniowa regulacja prędkości.
Przekładnia planetarna serii PX może być bezpośrednio podłączona do silników prądu przemiennego, silników krokowych i innych silników.
Seria PX może być również bezpośrednio połączona z reduktorem ślimakowym i cykloidalnym reduktorem wiatraczkowym, tworząc reduktory o różnych przełożeniach prędkości lub dużych przełożeniach.
Instrukcja modelu reduktora
Model silnika
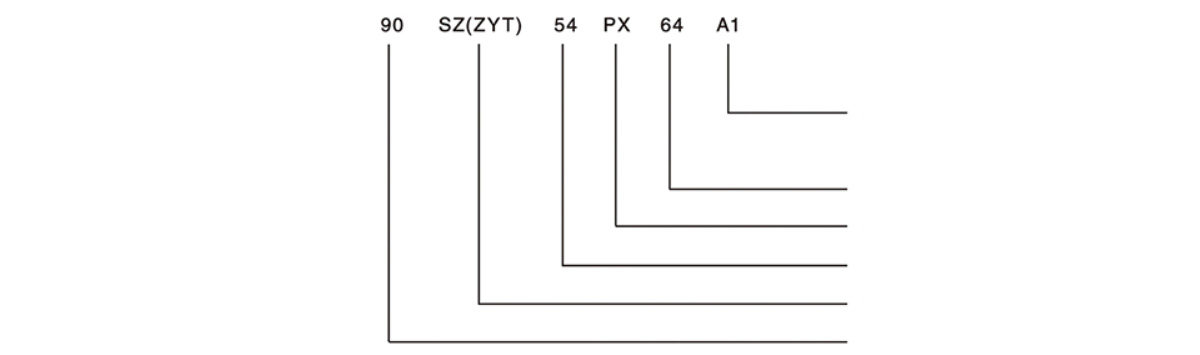
A1 – forma montażu: A1 to montaż na łapach, A3 to montaż na kołnierzu, B5 to montaż na okrągłym kołnierzu
64 -Stosunek redukcji: 1:64
PX - Zwykły precyzyjny reduktor planetarny
54 - Kod parametru wydajności silnika
SZ(ZYT) - Serwosilnik prądu stałego (silnik prądu stałego z magnesami trwałymi)
90 – Numer podstawy silnika: Wskazuje średnicę zewnętrzną 90 mm
Model reduktora
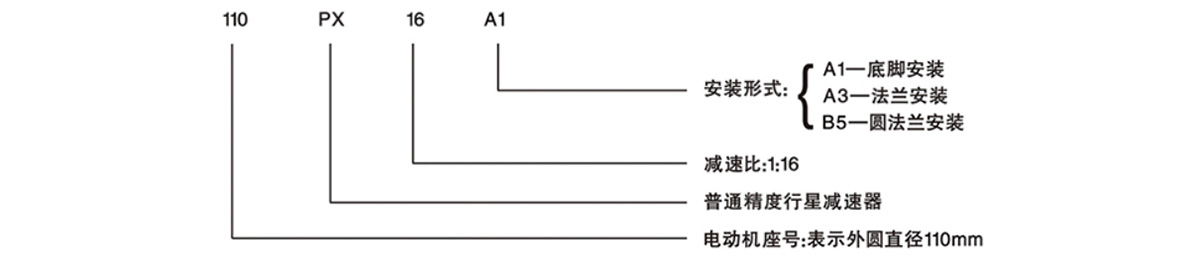
A1 – forma montażu: A1 to montaż na łapach, A3 to montaż na kołnierzu, B5 to montaż na okrągłym kołnierzu
16 - Stopień redukcji: 1:64
PX - Zwykły precyzyjny reduktor planetarny
110 – Numer podstawy silnika: Wskazuje średnicę zewnętrzną 90 mm
Dane techniczne silnika elektrycznego
| Prędkość (obr./min) | Moment obrotowy (mN.m) | Model | Moc | Prędkość znamionowa (obr./min) | Zainstalować | Napięcie znamionowe | Zmniejsz współczynnik | Uwagi | |
| 750 | 260 | 55ZYT | 29 | 3000 | A3 | 24 V: 55ZYT51 27 V: 55ZYT52 48 V: 55ZYT53 110 V: 55ZYT54 | 4 | ||
| 187,5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660 | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187,5 | 1270 | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187,5 | 1780 | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
Ogólny współczynnik prędkości serii PS
Poziom 1: 4, 6
Średnie: 16, 24, 36
Poziom 3: 64, 96, 144, 216
Poziom 4: 2563845768641296
Niestandardowy współczynnik prędkości serii 90PX
Poziom 1: 3
Poziom 2: 9, 12, 18
Poziom 3: 27, 48, 54, 72, 108
Poziom 4: 81, 162, 192, 288, 324, 432, 648
Niestandardowy współczynnik prędkości serii 110PX
Poziom 1: 5
Poziom 2: 20, 25, 30
Poziom 3: 80, 100, 120, 125, 150, 180
Poziom 4: 320, 400, 480, 500, 600, 625, 720, 750, 900, 1080
Można zaprojektować reduktory niestandardowe, takie jak specjalne przełożenie prędkości, prędkość, rozmiar instalacji itp
Przykład wyboru
Użytkownik może prawidłowo dobrać moc i model reduktora do aktualnego układu pracy i charakteru obciążenia, korzystając z poniższej treści.
1.W zależności od momentu obciążenia i prędkości wyjściowej reduktora wymaganą moc można obliczyć ze wzoru: P=T n/kh
We wzorze: P – moc wyjściowa WT – moment obciążenia Nm, należy wybrać n – prędkość wyjściową obr/min zgodnie z kartą techniczną
K- stała obciążenia 9560 η – sprawność przekładni, wybrana z poniższej tabeli
Współczynnik transmisji
| Przełożenie (i) | 4(6) | 16(36) | 64(216) | 256(1296) |
| η | 0,76 | 0,72 | 0,68 | 0,65 |
2.Można wybrać regulator silnika, aby realizować bezstopniową zmianę prędkości reduktora od O do prędkości znamionowej.
3. W zależności od aktualnego systemu roboczego i charakteru obciążenia, współczynnik eksploatacyjny można wybrać w oparciu o tabelę współczynników eksploatacyjnych. Po obliczeniu można określić wymaganą moc reduktora i w zależności od wymaganej prędkości wyjściowej dobrać model reduktora korzystając z tabeli danych technicznych.
Arkusz indeksu roboczego
| Dzienny czas pracy | Poziom obciążenia | |||
| Średnio stabilny | Średnio żywy | Silny wpływ | ||
| 12 | 1 | 1,25 | 1,75 | |
| 24 | 1,25 | 1,50 | 2 | |
Na przykład: jeśli obciążenie jest równe i stabilne, wymagana moc znamionowa silnika wynosi 40 W, napięcie znamionowe wynosi 110 V, współczynnik prędkości wyjściowej wynosi 4, a czas pracy dziennie wynosi 12 godzin, wówczas wybiera się 40 W. Jeżeli charakter obciążenia to umiarkowane wibracje:
Następnie: Aby wybrać serię usług na poziomie 1,25, zapoznaj się z tabelą współczynników usług. Wymagana moc W=40W*1,25=50W
B. Sprawdź kartę danych technicznych opcjonalnego J70SZ54P*4
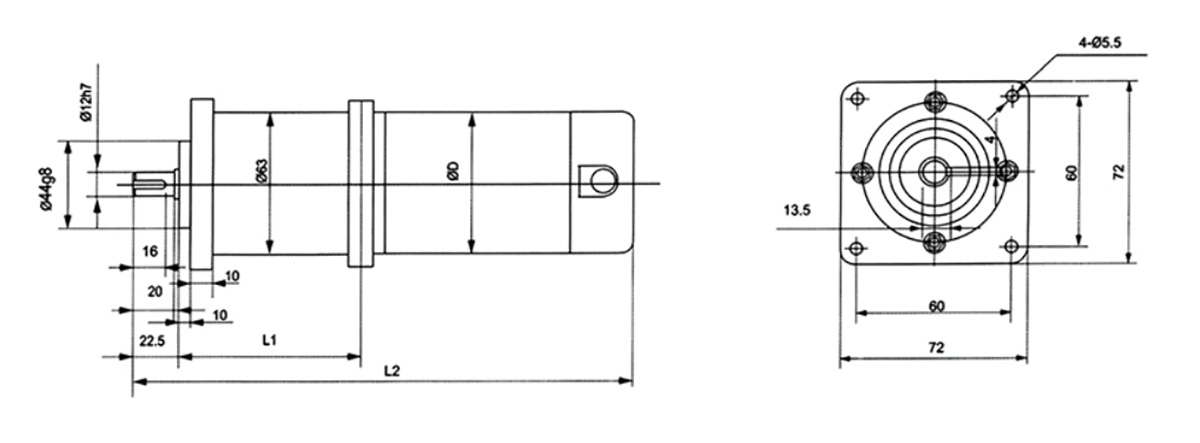
Kołnierz przedni 70PX
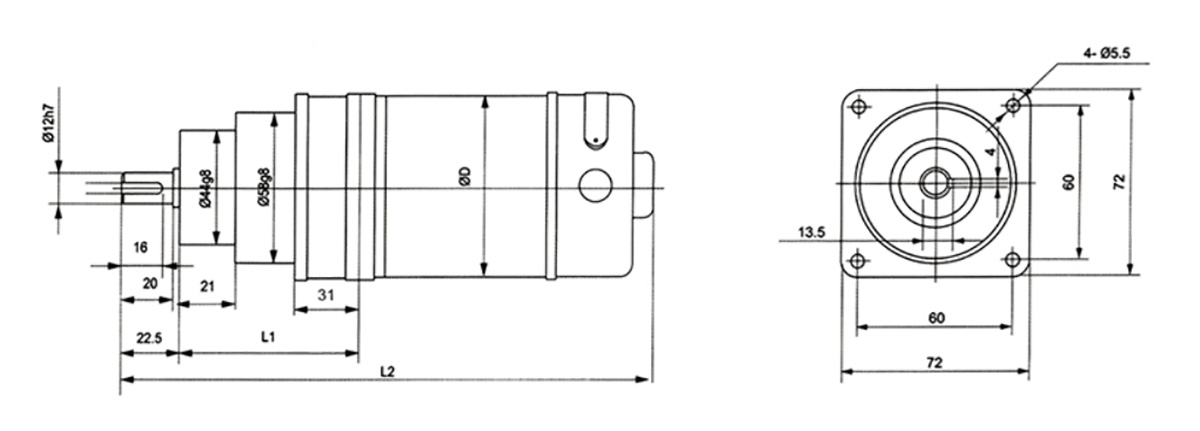
Tylny kołnierz 70PX
Kategorie produktów
-

Silnik do rolet XD-1500B
-

Bezszczotkowy silnik prądu stałego o dużej mocy, trwały magnes prądu stałego...
-

Silnik zwalniający DC 12V24V 10w miniaturowy brus...
-

WK SK DC sterowanie silnikiem serwo regulowany zasilacz ...
-

Akcesoria do silnika skrzyni biegów NMRV30 9...
-

Stojan i stempel wirnika pompy wodnej silnika Y2 280-...