ਮੋਟਰ ਸਿਧਾਂਤ ਅਤੇ ਕਈ ਮਹੱਤਵਪੂਰਨ ਫਾਰਮੂਲੇ ਯਾਦ ਰੱਖੋ, ਅਤੇ ਮੋਟਰ ਨੂੰ ਇੰਨਾ ਆਸਾਨ ਸਮਝੋ!
ਮੋਟਰਾਂ, ਆਮ ਤੌਰ 'ਤੇ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰਾਂ ਵਜੋਂ ਜਾਣੀਆਂ ਜਾਂਦੀਆਂ ਹਨ, ਜੋ ਕਿ ਮੋਟਰਾਂ ਵਜੋਂ ਵੀ ਜਾਣੀਆਂ ਜਾਂਦੀਆਂ ਹਨ, ਆਧੁਨਿਕ ਉਦਯੋਗ ਅਤੇ ਜੀਵਨ ਵਿੱਚ ਬਹੁਤ ਆਮ ਹਨ, ਅਤੇ ਇਹ ਬਿਜਲੀ ਊਰਜਾ ਨੂੰ ਮਕੈਨੀਕਲ ਊਰਜਾ ਵਿੱਚ ਬਦਲਣ ਲਈ ਸਭ ਤੋਂ ਮਹੱਤਵਪੂਰਨ ਉਪਕਰਣ ਵੀ ਹਨ।ਮੋਟਰਾਂ ਕਾਰਾਂ, ਹਾਈ-ਸਪੀਡ ਰੇਲ ਗੱਡੀਆਂ, ਹਵਾਈ ਜਹਾਜ਼ਾਂ, ਵਿੰਡ ਟਰਬਾਈਨਾਂ, ਰੋਬੋਟ, ਆਟੋਮੈਟਿਕ ਦਰਵਾਜ਼ੇ, ਪਾਣੀ ਦੇ ਪੰਪਾਂ, ਹਾਰਡ ਡਰਾਈਵਾਂ ਅਤੇ ਇੱਥੋਂ ਤੱਕ ਕਿ ਸਾਡੇ ਸਭ ਤੋਂ ਆਮ ਸੈਲ ਫ਼ੋਨਾਂ ਵਿੱਚ ਵੀ ਸਥਾਪਿਤ ਕੀਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ। ਬਹੁਤ ਸਾਰੇ ਲੋਕ ਜੋ ਮੋਟਰਾਂ ਲਈ ਨਵੇਂ ਹਨ ਜਾਂ ਜਿਨ੍ਹਾਂ ਨੇ ਮੋਟਰ ਡਰਾਈਵਿੰਗ ਦਾ ਗਿਆਨ ਹੁਣੇ ਹੀ ਸਿੱਖਿਆ ਹੈ, ਮਹਿਸੂਸ ਕਰ ਸਕਦੇ ਹਨ ਕਿ ਮੋਟਰਾਂ ਦੇ ਗਿਆਨ ਨੂੰ ਸਮਝਣਾ ਮੁਸ਼ਕਲ ਹੈ, ਅਤੇ ਇੱਥੋਂ ਤੱਕ ਕਿ ਸੰਬੰਧਿਤ ਕੋਰਸ ਵੀ ਵੇਖਦੇ ਹਨ, ਅਤੇ ਉਹਨਾਂ ਨੂੰ "ਕ੍ਰੈਡਿਟ ਕਿਲਰ" ਕਿਹਾ ਜਾਂਦਾ ਹੈ।ਹੇਠਾਂ ਦਿੱਤੇ ਖਿੰਡੇ ਹੋਏ ਸ਼ੇਅਰਿੰਗ ਨਵੇਂ ਲੋਕਾਂ ਨੂੰ AC ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੇ ਸਿਧਾਂਤ ਨੂੰ ਜਲਦੀ ਸਮਝਣ ਦੇ ਸਕਦੇ ਹਨ। ਮੋਟਰ ਦਾ ਸਿਧਾਂਤ: ਮੋਟਰ ਦਾ ਸਿਧਾਂਤ ਬਹੁਤ ਸਰਲ ਹੈ। ਸਾਦੇ ਸ਼ਬਦਾਂ ਵਿਚ, ਇਹ ਇਕ ਅਜਿਹਾ ਯੰਤਰ ਹੈ ਜੋ ਕੋਇਲ 'ਤੇ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਪੈਦਾ ਕਰਨ ਲਈ ਬਿਜਲੀ ਊਰਜਾ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ ਅਤੇ ਰੋਟਰ ਨੂੰ ਘੁੰਮਾਉਣ ਲਈ ਧੱਕਦਾ ਹੈ।ਕੋਈ ਵੀ ਜਿਸਨੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਇੰਡਕਸ਼ਨ ਦੇ ਕਾਨੂੰਨ ਦਾ ਅਧਿਐਨ ਕੀਤਾ ਹੈ ਉਹ ਜਾਣਦਾ ਹੈ ਕਿ ਇੱਕ ਊਰਜਾਵਾਨ ਕੋਇਲ ਨੂੰ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਘੁੰਮਾਉਣ ਲਈ ਮਜਬੂਰ ਕੀਤਾ ਜਾਵੇਗਾ। ਇਹ ਮੋਟਰ ਦਾ ਮੂਲ ਸਿਧਾਂਤ ਹੈ। ਇਹ ਜੂਨੀਅਰ ਹਾਈ ਸਕੂਲ ਭੌਤਿਕ ਵਿਗਿਆਨ ਦਾ ਗਿਆਨ ਹੈ। ਮੋਟਰ ਦਾ ਢਾਂਚਾ: ਕੋਈ ਵੀ ਵਿਅਕਤੀ ਜਿਸ ਨੇ ਮੋਟਰ ਨੂੰ ਵੱਖ ਕੀਤਾ ਹੈ, ਉਹ ਜਾਣਦਾ ਹੈ ਕਿ ਮੋਟਰ ਮੁੱਖ ਤੌਰ 'ਤੇ ਦੋ ਹਿੱਸਿਆਂ, ਸਥਿਰ ਸਟੇਟਰ ਹਿੱਸੇ ਅਤੇ ਘੁੰਮਣ ਵਾਲੇ ਰੋਟਰ ਹਿੱਸੇ ਨਾਲ ਬਣੀ ਹੈ, ਹੇਠਾਂ ਦਿੱਤੇ ਅਨੁਸਾਰ: ਸਟੈਟਰ ਕੋਰ: ਮੋਟਰ ਦੇ ਚੁੰਬਕੀ ਸਰਕਟ ਦਾ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਹਿੱਸਾ, ਜਿਸ 'ਤੇ ਸਟੇਟਰ ਵਿੰਡਿੰਗਜ਼ ਰੱਖੇ ਜਾਂਦੇ ਹਨ; ਸਟੇਟਰ ਵਿੰਡਿੰਗ: ਇਹ ਕੋਇਲ ਹੈ, ਮੋਟਰ ਦਾ ਸਰਕਟ ਹਿੱਸਾ, ਜੋ ਬਿਜਲੀ ਦੀ ਸਪਲਾਈ ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ ਅਤੇ ਇੱਕ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਪੈਦਾ ਕਰਨ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ; ਮਸ਼ੀਨ ਬੇਸ: ਸਟੇਟਰ ਕੋਰ ਅਤੇ ਮੋਟਰ ਐਂਡ ਕਵਰ ਨੂੰ ਠੀਕ ਕਰੋ, ਅਤੇ ਸੁਰੱਖਿਆ ਅਤੇ ਗਰਮੀ ਦੀ ਖਰਾਬੀ ਦੀ ਭੂਮਿਕਾ ਨਿਭਾਓ; ਰੋਟਰ ਕੋਰ: ਮੋਟਰ ਦੇ ਚੁੰਬਕੀ ਸਰਕਟ ਦਾ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਹਿੱਸਾ, ਰੋਟਰ ਵਿੰਡਿੰਗ ਨੂੰ ਕੋਰ ਸਲਾਟ ਵਿੱਚ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ; ਰੋਟਰ ਵਾਇਨਿੰਗ: ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਅਤੇ ਕਰੰਟ ਪੈਦਾ ਕਰਨ ਲਈ ਸਟੇਟਰ ਦੇ ਘੁੰਮਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਕੱਟਣਾ, ਅਤੇ ਮੋਟਰ ਨੂੰ ਘੁੰਮਾਉਣ ਲਈ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਟਾਰਕ ਬਣਾਉਣਾ; 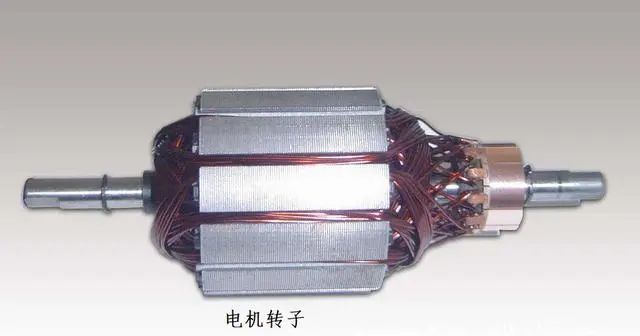
1. ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਸਬੰਧਤ 1) ਮੋਟਰ ਦਾ ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਫਾਰਮੂਲਾ: E=4.44*f*N*Φ, E ਕੋਇਲ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਹੈ, f ਬਾਰੰਬਾਰਤਾ ਹੈ, S ਆਲੇ ਦੁਆਲੇ ਦੇ ਕੰਡਕਟਰ ਦਾ ਕਰਾਸ-ਸੈਕਸ਼ਨਲ ਖੇਤਰ ਹੈ (ਜਿਵੇਂ ਕਿ ਲੋਹਾ ਕੋਰ), N ਮੋੜਾਂ ਦੀ ਸੰਖਿਆ ਹੈ, ਅਤੇ Φ ਚੁੰਬਕੀ ਪਾਸ ਹੈ। ਫਾਰਮੂਲਾ ਕਿਵੇਂ ਲਿਆ ਜਾਂਦਾ ਹੈ, ਅਸੀਂ ਇਹਨਾਂ ਚੀਜ਼ਾਂ ਦੀ ਖੋਜ ਨਹੀਂ ਕਰਾਂਗੇ, ਅਸੀਂ ਮੁੱਖ ਤੌਰ 'ਤੇ ਦੇਖਾਂਗੇ ਕਿ ਇਸਦੀ ਵਰਤੋਂ ਕਿਵੇਂ ਕਰਨੀ ਹੈ।ਪ੍ਰੇਰਿਤ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਬਲ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਇੰਡਕਸ਼ਨ ਦਾ ਤੱਤ ਹੈ। ਇੰਡਿਊਸਡ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਵਾਲੇ ਕੰਡਕਟਰ ਦੇ ਬੰਦ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਇੱਕ ਪ੍ਰੇਰਿਤ ਕਰੰਟ ਪੈਦਾ ਹੋਵੇਗਾ।ਪ੍ਰੇਰਿਤ ਕਰੰਟ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਇੱਕ ਐਂਪੀਅਰ ਬਲ ਦੇ ਅਧੀਨ ਹੁੰਦਾ ਹੈ, ਇੱਕ ਚੁੰਬਕੀ ਪਲ ਬਣਾਉਂਦਾ ਹੈ ਜੋ ਕੋਇਲ ਨੂੰ ਮੋੜਨ ਲਈ ਧੱਕਦਾ ਹੈ। ਉਪਰੋਕਤ ਫਾਰਮੂਲੇ ਤੋਂ ਇਹ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ ਕਿ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਦੀ ਤੀਬਰਤਾ ਪਾਵਰ ਸਪਲਾਈ ਦੀ ਬਾਰੰਬਾਰਤਾ, ਕੋਇਲ ਦੇ ਮੋੜਾਂ ਦੀ ਗਿਣਤੀ ਅਤੇ ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ ਦੇ ਅਨੁਪਾਤੀ ਹੈ। ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ ਗਣਨਾ ਫਾਰਮੂਲਾ Φ=B*S*COSθ, ਜਦੋਂ ਖੇਤਰ S ਵਾਲਾ ਸਮਤਲ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਲਈ ਲੰਬਵਤ ਹੁੰਦਾ ਹੈ, ਕੋਣ θ 0 ਹੁੰਦਾ ਹੈ, COSθ 1 ਦੇ ਬਰਾਬਰ ਹੁੰਦਾ ਹੈ, ਅਤੇ ਫਾਰਮੂਲਾ Φ=B*S ਬਣ ਜਾਂਦਾ ਹੈ। . 
ਉਪਰੋਕਤ ਦੋ ਫਾਰਮੂਲਿਆਂ ਨੂੰ ਮਿਲਾ ਕੇ, ਤੁਸੀਂ ਮੋਟਰ ਦੀ ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ ਤੀਬਰਤਾ ਦੀ ਗਣਨਾ ਕਰਨ ਲਈ ਫਾਰਮੂਲਾ ਪ੍ਰਾਪਤ ਕਰ ਸਕਦੇ ਹੋ: B=E/(4.44*f*N*S)। 2) ਦੂਜਾ ਐਂਪੀਅਰ ਫੋਰਸ ਫਾਰਮੂਲਾ ਹੈ। ਇਹ ਜਾਣਨ ਲਈ ਕਿ ਕੋਇਲ ਕਿੰਨਾ ਬਲ ਪ੍ਰਾਪਤ ਕਰ ਰਿਹਾ ਹੈ, ਸਾਨੂੰ ਇਸ ਫਾਰਮੂਲੇ ਦੀ ਲੋੜ ਹੈ F=I*L*B*sinα, ਜਿੱਥੇ I ਮੌਜੂਦਾ ਤਾਕਤ ਹੈ, L ਕੰਡਕਟਰ ਦੀ ਲੰਬਾਈ ਹੈ, B ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਹੈ, α ਵਿਚਕਾਰ ਕੋਣ ਹੈ। ਕਰੰਟ ਦੀ ਦਿਸ਼ਾ ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ।ਜਦੋਂ ਤਾਰ ਚੁੰਬਕੀ ਖੇਤਰ ਲਈ ਲੰਬਵਤ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਫਾਰਮੂਲਾ F=I*L*B ਬਣ ਜਾਂਦਾ ਹੈ (ਜੇਕਰ ਇਹ ਇੱਕ N-ਟਰਨ ਕੋਇਲ ਹੈ, ਤਾਂ ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ B N-ਟਰਨ ਕੋਇਲ ਦਾ ਕੁੱਲ ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ ਹੈ, ਅਤੇ ਇੱਥੇ ਕੋਈ ਨਹੀਂ ਹੈ। N ਗੁਣਾ ਕਰਨ ਦੀ ਲੋੜ ਹੈ). ਜੇ ਤੁਸੀਂ ਬਲ ਨੂੰ ਜਾਣਦੇ ਹੋ, ਤਾਂ ਤੁਸੀਂ ਟੋਰਕ ਨੂੰ ਜਾਣੋਗੇ. ਟਾਰਕ ਕਿਰਿਆ ਦੇ ਘੇਰੇ ਨਾਲ ਗੁਣਾ ਕੀਤੇ ਟਾਰਕ ਦੇ ਬਰਾਬਰ ਹੁੰਦਾ ਹੈ, T=r*F=r*I*B*L (ਵੈਕਟਰ ਉਤਪਾਦ)।ਪਾਵਰ = ਫੋਰਸ * ਸਪੀਡ (P = F * V) ਅਤੇ ਲੀਨੀਅਰ ਸਪੀਡ V = 2πR * ਸਪੀਡ ਪ੍ਰਤੀ ਸਕਿੰਟ (n ਸਕਿੰਟ) ਦੇ ਦੋ ਫਾਰਮੂਲਿਆਂ ਦੁਆਰਾ, ਪਾਵਰ ਨਾਲ ਸਬੰਧ ਸਥਾਪਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ, ਅਤੇ ਹੇਠਾਂ ਦਿੱਤੇ ਨੰਬਰ 3 ਦਾ ਫਾਰਮੂਲਾ ਬਣਾ ਸਕਦਾ ਹੈ। ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾਵੇ।ਹਾਲਾਂਕਿ, ਇਹ ਨੋਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ ਕਿ ਅਸਲ ਆਉਟਪੁੱਟ ਟਾਰਕ ਇਸ ਸਮੇਂ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ, ਇਸਲਈ ਗਣਨਾ ਕੀਤੀ ਪਾਵਰ ਆਉਟਪੁੱਟ ਪਾਵਰ ਹੈ। 2. AC ਅਸਿੰਕਰੋਨਸ ਮੋਟਰ ਦੀ ਗਤੀ ਦਾ ਗਣਨਾ ਫਾਰਮੂਲਾ: n=60f/P, ਇਹ ਬਹੁਤ ਸਰਲ ਹੈ, ਸਪੀਡ ਪਾਵਰ ਸਪਲਾਈ ਦੀ ਬਾਰੰਬਾਰਤਾ ਦੇ ਅਨੁਪਾਤੀ ਹੈ, ਅਤੇ ਪੋਲ ਜੋੜਿਆਂ ਦੀ ਸੰਖਿਆ ਦੇ ਉਲਟ ਅਨੁਪਾਤੀ ਹੈ (ਇੱਕ ਜੋੜਾ ਯਾਦ ਰੱਖੋ ) ਮੋਟਰ ਦਾ, ਸਿਰਫ਼ ਫਾਰਮੂਲਾ ਸਿੱਧਾ ਲਾਗੂ ਕਰੋ।ਹਾਲਾਂਕਿ, ਇਹ ਫਾਰਮੂਲਾ ਅਸਲ ਵਿੱਚ ਸਮਕਾਲੀ ਗਤੀ (ਘੁੰਮਣ ਵਾਲੀ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਗਤੀ) ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ, ਅਤੇ ਅਸਿੰਕ੍ਰੋਨਸ ਮੋਟਰ ਦੀ ਅਸਲ ਗਤੀ ਸਮਕਾਲੀ ਗਤੀ ਤੋਂ ਥੋੜ੍ਹੀ ਘੱਟ ਹੋਵੇਗੀ, ਇਸਲਈ ਅਸੀਂ ਅਕਸਰ ਦੇਖਦੇ ਹਾਂ ਕਿ 4-ਪੋਲ ਮੋਟਰ ਆਮ ਤੌਰ 'ਤੇ 1400 rpm ਤੋਂ ਵੱਧ ਹੁੰਦੀ ਹੈ, ਪਰ 1500 rpm ਤੋਂ ਘੱਟ। 3. ਮੋਟਰ ਟਾਰਕ ਅਤੇ ਪਾਵਰ ਮੀਟਰ ਸਪੀਡ ਵਿਚਕਾਰ ਸਬੰਧ: T=9550P/n (P ਮੋਟਰ ਪਾਵਰ ਹੈ, n ਮੋਟਰ ਸਪੀਡ ਹੈ), ਜੋ ਉੱਪਰ ਦਿੱਤੇ ਨੰਬਰ 1 ਦੀ ਸਮੱਗਰੀ ਤੋਂ ਕੱਢਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਪਰ ਸਾਨੂੰ ਸਿੱਖਣ ਦੀ ਲੋੜ ਨਹੀਂ ਹੈ। ਅਨੁਮਾਨ ਲਗਾਉਣ ਲਈ, ਇਸ ਗਣਨਾ ਨੂੰ ਯਾਦ ਰੱਖੋ ਇੱਕ ਫਾਰਮੂਲਾ ਕਰੇਗਾ।ਪਰ ਦੁਬਾਰਾ ਯਾਦ ਕਰਾਓ, ਫਾਰਮੂਲੇ ਵਿੱਚ ਪਾਵਰ P ਇਨਪੁਟ ਪਾਵਰ ਨਹੀਂ ਹੈ, ਪਰ ਆਉਟਪੁੱਟ ਪਾਵਰ ਹੈ। ਮੋਟਰ ਦੇ ਨੁਕਸਾਨ ਦੇ ਕਾਰਨ, ਇਨਪੁਟ ਪਾਵਰ ਆਉਟਪੁੱਟ ਪਾਵਰ ਦੇ ਬਰਾਬਰ ਨਹੀਂ ਹੈ.ਪਰ ਕਿਤਾਬਾਂ ਨੂੰ ਅਕਸਰ ਆਦਰਸ਼ ਬਣਾਇਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਇਨਪੁਟ ਪਾਵਰ ਆਉਟਪੁੱਟ ਪਾਵਰ ਦੇ ਬਰਾਬਰ ਹੁੰਦੀ ਹੈ। 
4. ਮੋਟਰ ਪਾਵਰ (ਇਨਪੁਟ ਪਾਵਰ): 1) ਸਿੰਗਲ-ਫੇਜ਼ ਮੋਟਰ ਪਾਵਰ ਕੈਲਕੂਲੇਸ਼ਨ ਫਾਰਮੂਲਾ: P=U*I*cosφ, ਜੇਕਰ ਪਾਵਰ ਫੈਕਟਰ 0.8 ਹੈ, ਵੋਲਟੇਜ 220V ਹੈ, ਅਤੇ ਕਰੰਟ 2A ਹੈ, ਤਾਂ ਪਾਵਰ P=0.22×2×0.8=0.352KW। 2) ਥ੍ਰੀ-ਫੇਜ਼ ਮੋਟਰ ਪਾਵਰ ਕੈਲਕੂਲੇਸ਼ਨ ਫਾਰਮੂਲਾ: P=1.732*U*I*cosφ (cosφ ਪਾਵਰ ਫੈਕਟਰ ਹੈ, U ਲੋਡ ਲਾਈਨ ਵੋਲਟੇਜ ਹੈ, ਅਤੇ I ਲੋਡ ਲਾਈਨ ਕਰੰਟ ਹੈ)।ਹਾਲਾਂਕਿ, ਇਸ ਕਿਸਮ ਦੇ U ਅਤੇ I ਮੋਟਰ ਦੇ ਕੁਨੈਕਸ਼ਨ ਨਾਲ ਸਬੰਧਤ ਹਨ। ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਵਿੱਚ, ਕਿਉਂਕਿ 120° ਵੋਲਟੇਜ ਦੁਆਰਾ ਵੱਖ ਕੀਤੀਆਂ ਤਿੰਨ ਕੋਇਲਾਂ ਦੇ ਸਾਂਝੇ ਸਿਰੇ ਇੱਕ 0 ਬਿੰਦੂ ਬਣਾਉਣ ਲਈ ਇੱਕ ਦੂਜੇ ਨਾਲ ਜੁੜੇ ਹੋਏ ਹਨ, ਲੋਡ ਕੋਇਲ ਉੱਤੇ ਲੋਡ ਕੀਤੀ ਗਈ ਵੋਲਟੇਜ ਅਸਲ ਵਿੱਚ ਪੜਾਅ-ਤੋਂ-ਪੜਾਅ ਹੁੰਦੀ ਹੈ। ਜਦੋਂ ਡੈਲਟਾ ਕੁਨੈਕਸ਼ਨ ਵਿਧੀ ਵਰਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਇੱਕ ਪਾਵਰ ਲਾਈਨ ਹਰੇਕ ਕੋਇਲ ਦੇ ਹਰੇਕ ਸਿਰੇ ਨਾਲ ਜੁੜੀ ਹੁੰਦੀ ਹੈ, ਇਸਲਈ ਲੋਡ ਕੋਇਲ ਉੱਤੇ ਵੋਲਟੇਜ ਲਾਈਨ ਵੋਲਟੇਜ ਹੁੰਦੀ ਹੈ।ਜੇਕਰ ਆਮ ਤੌਰ 'ਤੇ ਵਰਤੇ ਜਾਂਦੇ 3-ਫੇਜ਼ 380V ਵੋਲਟੇਜ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਰਾ ਕੁਨੈਕਸ਼ਨ ਵਿੱਚ ਕੋਇਲ 220V ਹੈ, ਅਤੇ ਡੈਲਟਾ 380V, P=U*I=U^2/R ਹੈ, ਇਸਲਈ ਡੈਲਟਾ ਕੁਨੈਕਸ਼ਨ ਵਿੱਚ ਪਾਵਰ ਸਟਾਰ ਕਨੈਕਸ਼ਨ 3 ਵਾਰ ਹੈ, ਇਸੇ ਕਰਕੇ ਹਾਈ-ਪਾਵਰ ਮੋਟਰ ਸਟਾਰਟ-ਡੈਲਟਾ ਸਟੈਪ-ਡਾਊਨ ਦੀ ਵਰਤੋਂ ਕਰਦੀ ਹੈ। ਉਪਰੋਕਤ ਫਾਰਮੂਲੇ ਵਿੱਚ ਮੁਹਾਰਤ ਹਾਸਲ ਕਰਨ ਅਤੇ ਚੰਗੀ ਤਰ੍ਹਾਂ ਸਮਝਣ ਤੋਂ ਬਾਅਦ, ਮੋਟਰ ਦੇ ਸਿਧਾਂਤ ਨੂੰ ਉਲਝਣ ਵਿੱਚ ਨਹੀਂ ਰੱਖਿਆ ਜਾਵੇਗਾ ਅਤੇ ਨਾ ਹੀ ਤੁਸੀਂ ਮੋਟਰ ਡਰਾਈਵਿੰਗ ਦੇ ਉੱਚ ਪੱਧਰੀ ਕੋਰਸ ਨੂੰ ਸਿੱਖਣ ਤੋਂ ਡਰੋਗੇ। 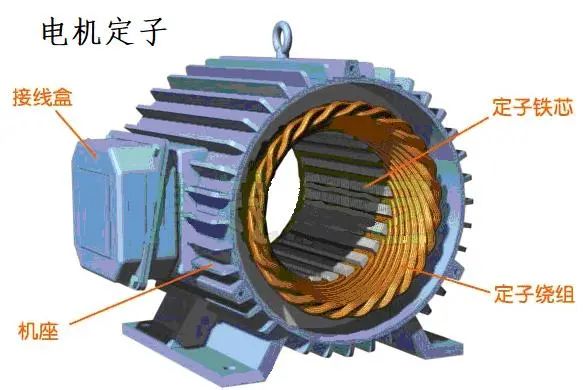
1) ਪੱਖਾ: ਆਮ ਤੌਰ 'ਤੇ ਮੋਟਰ ਨੂੰ ਗਰਮੀ ਨੂੰ ਦੂਰ ਕਰਨ ਲਈ ਮੋਟਰ ਦੀ ਪੂਛ 'ਤੇ ਸਥਾਪਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ; 2) ਜੰਕਸ਼ਨ ਬਾਕਸ: ਪਾਵਰ ਸਪਲਾਈ ਨਾਲ ਜੁੜਨ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ, ਜਿਵੇਂ ਕਿ AC ਤਿੰਨ-ਪੜਾਅ ਅਸਿੰਕਰੋਨਸ ਮੋਟਰ, ਇਸ ਨੂੰ ਲੋੜਾਂ ਅਨੁਸਾਰ ਸਟਾਰ ਜਾਂ ਡੈਲਟਾ ਨਾਲ ਵੀ ਜੋੜਿਆ ਜਾ ਸਕਦਾ ਹੈ; 3) ਬੇਅਰਿੰਗ: ਮੋਟਰ ਦੇ ਘੁੰਮਦੇ ਅਤੇ ਸਥਿਰ ਹਿੱਸਿਆਂ ਨੂੰ ਜੋੜਨਾ; 4. ਸਿਰੇ ਦਾ ਕਵਰ: ਮੋਟਰ ਦੇ ਬਾਹਰ ਦੇ ਅਗਲੇ ਅਤੇ ਪਿਛਲੇ ਕਵਰ ਸਹਾਇਕ ਭੂਮਿਕਾ ਨਿਭਾਉਂਦੇ ਹਨ।
ਪੋਸਟ ਟਾਈਮ: ਜੂਨ-13-2022 top