မော်တာနိယာမနှင့် အရေးကြီးသော ဖော်မြူလာများစွာကို သတိရပါ၊ မော်တာအား လွယ်ကူစွာ ရှာဖွေပါ။
မော်တာဟု လူသိများသော လျှပ်စစ်မော်တာဟု ယေဘုယျအားဖြင့် ရည်ညွှန်းသော မော်တာများသည် ခေတ်မီစက်မှုလုပ်ငန်းနှင့် အသက်တာတွင် အလွန်အသုံးများပြီး လျှပ်စစ်စွမ်းအင်ကို စက်စွမ်းအင်အဖြစ်သို့ ပြောင်းလဲရန်အတွက် အရေးကြီးဆုံးကိရိယာများလည်းဖြစ်သည်။မော်တာများကို ကားများ၊ မြန်နှုန်းမြင့်ရထားများ၊ လေယာဉ်များ၊ လေတာဘိုင်များ၊ စက်ရုပ်များ၊ အလိုအလျောက်တံခါးများ၊ ရေစုပ်စက်များ၊ ဟာ့ဒ်ဒရိုက်များနှင့် ကျွန်ုပ်တို့၏ အသုံးအများဆုံး ဆဲလ်ဖုန်းများတွင် တပ်ဆင်ထားပါသည်။ မော်တာနှင့်ပတ်သက်ပြီး အသစ်အသစ်သော သို့မဟုတ် မော်တော်ကားမောင်းနှင်ခြင်းဆိုင်ရာ အသိပညာကို သင်ယူဖူးသူအများအပြားသည် မော်တာအသိပညာကို နားလည်ရန်ခက်ခဲပြီး သက်ဆိုင်ရာသင်တန်းများကိုပင် မြင်နိုင်ပြီး ၎င်းတို့ကို "ခရက်ဒစ်လူသတ်သမားများ" ဟုခေါ်သည်။အောက်ပါကွဲပြားသောမျှဝေမှုသည် AC asynchronous motor ၏နိယာမကို အတွေ့အကြုံမရှိသေးသူများကို လျင်မြန်စွာနားလည်နိုင်စေပါသည်။ မော်တာ၏နိယာမ- မော်တာ၏နိယာမသည်အလွန်ရိုးရှင်းသည်။ ရိုးရိုးရှင်းရှင်းပြောရလျှင် ၎င်းသည် ကွိုင်ပေါ်တွင် လည်ပတ်နေသော သံလိုက်စက်ကွင်းကို ထုတ်ပေးရန်နှင့် ရဟတ်ကို လှည့်ရန် တွန်းပို့ရန် လျှပ်စစ်စွမ်းအင်ကို အသုံးပြုသည့် ကိရိယာတစ်ခုဖြစ်သည်။လျှပ်စစ်သံလိုက် လျှပ်စီးကြောင်း နိယာမကို လေ့လာဖူးသူတိုင်း သည် စွမ်းအင်ရှိသော ကွိုင်အား သံလိုက်စက်ကွင်းတွင် လှည့်ပတ်ရန် တွန်းအားပေးမည်ကို သိရှိပါသည်။ ဤသည်မှာ မော်တာ၏ အခြေခံသဘောတရားဖြစ်သည်။ ဒါက အလယ်တန်းကျောင်း ရူပဗေဒ ဗဟုသုတပါ။ မော်တာဖွဲ့စည်းပုံ- မော်တာအား ဖြုတ်ထားဖူးသူတိုင်းသည် အောက်ပါအတိုင်း မော်တာအား အပိုင်းနှစ်ပိုင်း၊ ပုံသေ stator အပိုင်းနှင့် rotating rotor အပိုင်း ဟူ၍ အပိုင်းနှစ်ပိုင်းဖြင့် အဓိကဖွဲ့စည်းထားကြောင်း သိရှိပါသည်- Stator core- stator windings များကိုထားရှိပေးသောမော်တာ၏သံလိုက်ပတ်လမ်း၏အရေးကြီးသောအစိတ်အပိုင်းတစ်ခု။ Stator အကွေ့အကောက်များ- ၎င်းသည် ကွိုင်၊ ပါဝါထောက်ပံ့မှုနှင့် ချိတ်ဆက်ကာ လည်ပတ်နေသော သံလိုက်စက်ကွင်းကို ထုတ်လုပ်ရန် အသုံးပြုသည့် မော်တာ၏ ဆားကစ်အစိတ်အပိုင်းဖြစ်သည်။ စက်အခြေခံ- stator core နှင့် motor end cover ကို ပြုပြင်ပြီး အကာအကွယ်နှင့် အပူများ ပျံ့နှံ့ခြင်း၏ အခန်းကဏ္ဍကို ကစားပါ။ 2. Rotor (rotating part)၊ Rotor core: မော်တာ၏သံလိုက်ပတ်လမ်း၏အရေးကြီးသောအစိတ်အပိုင်းတစ်ခု၊ ရဟတ်အကွေ့အကောက်များကို core slot တွင်ထားရှိသည်; ရဟတ်အကွေ့အကောက်များ- တွန်းအားဖြစ်စေသော လျှပ်စစ်မော်တော်ဆိုင်ကယ်တွန်းအားနှင့် လျှပ်စီးကြောင်းကို ထုတ်ပေးရန်အတွက် stator ၏ လည်ပတ်သံလိုက်စက်ကွင်းကို ဖြတ်တောက်ကာ မော်တာအား လှည့်ရန်အတွက် လျှပ်စစ်သံလိုက် torque ကို ဖန်တီးခြင်း၊ 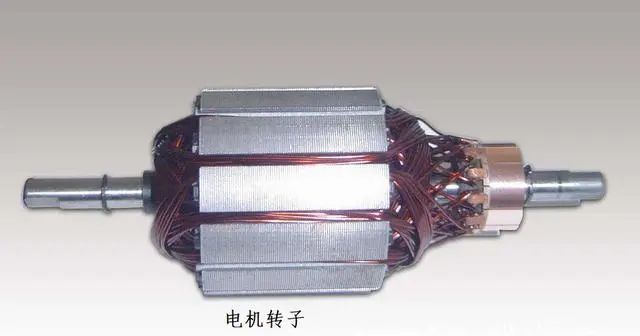
မော်တာ၏ တွက်ချက်မှု ဖော်မြူလာအများအပြား- 1. Electromagnetic ဆက်စပ်မှု 1) မော်တာ၏ induced electromotive force formula: E=4.44*f*N*Φ၊ E သည် coil electromotive force၊ f သည် frequency၊ S သည် ပတ်ဝန်းကျင် conductor ၏ cross-sectional area (ဥပမာ သံ၊ core) N သည် အလှည့်အပြောင်းအရေအတွက်ဖြစ်ပြီး Φ သည် သံလိုက်အသွားအလာဖြစ်သည်။ ဖော်မြူလာက ဘယ်လို ဆင်းသက်လာတယ်၊ ဒီအရာတွေကို စေ့စေ့စပ်စပ် မလေ့လာဘဲ၊ အဲဒါကို ဘယ်လိုသုံးရမလဲဆိုတာ အဓိကအားဖြင့် ကြည့်မယ်။Induced electromotive force သည် electromagnetic induction ၏ အနှစ်သာရဖြစ်သည်။ induced electromotive force ရှိသော conductor ကို ပိတ်ပြီးနောက်၊ induced Current ကို ထုတ်ပေးမည်ဖြစ်ပါသည်။လျှပ်စီးကြောင်းသည် သံလိုက်စက်ကွင်းရှိ အမ်ပီယာတွန်းအားကို သက်ရောက်စေပြီး ကွိုင်ကို လှည့်ရန် သံလိုက်အခိုက်အတန့်တစ်ခု ဖန်တီးသည်။ အထက်ဖော်ပြပါ ပုံသေနည်းအရ လျှပ်စစ်မော်တာတွန်းအား၏ ပြင်းအားသည် ပါဝါထောက်ပံ့မှု၏ ကြိမ်နှုန်း၊ ကွိုင်၏ အလှည့်အပြောင်း အရေအတွက်နှင့် သံလိုက်အတက်အကျတို့နှင့် အချိုးကျကြောင်း သိရှိရပါသည်။ Magnetic flux တွက်ချက်မှုဖော်မြူလာ Φ=B*S*COSθ၊ ဧရိယာ S ပါသော လေယာဉ်သည် သံလိုက်စက်ကွင်း၏ ဦးတည်ရာသို့ ထောင့်မှန်ကျသောအခါ၊ ထောင့် θ သည် 0၊ COSθ သည် 1 နှင့် ညီမျှပြီး ဖော်မြူလာ Φ=B*S ဖြစ်သွားသည်။ . 
အထက်ပါ ဖော်မြူလာနှစ်ခုကို ပေါင်းစပ်ခြင်းဖြင့် မော်တာ၏ သံလိုက်အတက်အကျ ပြင်းအားကို တွက်ချက်ရန်အတွက် ဖော်မြူလာကို သင်ရနိုင်သည်- B=E/(4.44*f*N*S)။ 2) နောက်တစ်ခုကတော့ Ampere force formula ဖြစ်ပါတယ်။ ကွိုင်၏ တွန်းအား မည်မျှလက်ခံသည်ကို သိရှိရန်၊ ကျွန်ုပ်သည် လက်ရှိ ခွန်အား၊ L သည် စပယ်ယာ အရှည်၊ B သည် သံလိုက်စက်ကွင်း ခွန်အား၊ α သည် ၎င်းကြားရှိ ထောင့်ဖြစ်သည်။ လျှပ်စီးကြောင်း၏ဦးတည်ချက်နှင့် သံလိုက်စက်ကွင်း၏ ဦးတည်ရာ။ဝါယာကြိုးသည် သံလိုက်စက်ကွင်းနှင့် ထောင့်မှန်ကျသောအခါ ဖော်မြူလာသည် F=I*L*B ဖြစ်လာသည် (၎င်းသည် N-turn coil ဖြစ်ပါက၊ သံလိုက် flux B သည် N-turn coil ၏ စုစုပေါင်းသံလိုက် flux ဖြစ်ပြီး၊ မရှိပေ။ N ကို မြှောက်ရန် လိုအပ်ပါသည်။) စွမ်းအားကိုသိရင် torque ကိုသိလိမ့်မယ်။ torque သည် လုပ်ဆောင်ချက်၏ အချင်းဝက်ဖြင့် မြှောက်ထားသော torque နှင့် ညီမျှသည်၊ T=r*F=r*I*B*L (vector product)။ပါဝါ = တွန်းအား * အမြန်နှုန်း (P = F * V) နှင့် linear အမြန်နှုန်း V = 2πR * အမြန်နှုန်း တစ်စက္ကန့် (n စက္ကန့်) အားဖြင့် ပါဝါနှင့် ဆက်နွယ်မှုကို ထူထောင်နိုင်ပြီး၊ အောက်ပါ အမှတ်စဉ် 3 ၏ ဖော်မြူလာသည် လုပ်နိုင်သည်၊ ရယူပါ။သို့သော်လည်း အမှန်တကယ် output torque ကို ယခုအချိန်တွင် အသုံးပြုထားသောကြောင့် တွက်ချက်ထားသော power သည် output power ဖြစ်သည်။ 2. AC asynchronous motor ၏ အမြန်နှုန်း တွက်ချက်မှု ပုံသေနည်း- n=60f/P၊ ၎င်းသည် အလွန်ရိုးရှင်းသည်၊ မြန်နှုန်းသည် ပါဝါထောက်ပံ့မှု၏ ကြိမ်နှုန်းနှင့် အချိုးကျပြီး တိုင်အတွဲအရေအတွက်နှင့် ပြောင်းပြန်အချိုးကျသည် (တစ်စုံကို သတိရပါ။ ) မော်တာ၏ ဖော်မြူလာကို တိုက်ရိုက် အသုံးပြုပါ။သို့သော်၊ ဤဖော်မြူလာသည် synchronous speed (လှည့်ပတ်သံလိုက်စက်ကွင်းအမြန်နှုန်း) ကို အမှန်တကယ်တွက်ချက်ပြီး asynchronous motor ၏အမှန်တကယ်အမြန်နှုန်းသည် synchronous speed ထက် အနည်းငယ်နိမ့်လိမ့်မည်၊ ထို့ကြောင့် 4-pole motor သည် ယေဘူယျအားဖြင့် 1400 rpm ထက် ပိုသည်ကို တွေ့ရတတ်သည်။ ဒါပေမယ့် 1500 rpm ထက်နည်းပါတယ်။ 3. မော်တာ torque နှင့် power meter speed အကြားဆက်နွယ်မှု- T=9550P/n (P သည် motor power၊ n သည် motor speed) ၊ အထက်နံပါတ် 1 ပါအကြောင်းအရာမှ နုတ်ယူနိုင်သော်လည်း ကျွန်ုပ်တို့ လေ့လာရန်မလိုအပ်ပါ။ တွက်ဆရန်၊ ဤတွက်ချက်မှု A သည် ဖော်မြူလာပြုမည်ကို သတိရပါ။သို့သော် ထပ်ပြီးသတိပေးပါ၊ ဖော်မြူလာရှိ ပါဝါ P သည် အဝင်ပါဝါမဟုတ်သော်လည်း အထွက်ပါဝါဖြစ်သည်။ မော်တာ ဆုံးရှုံးမှုကြောင့် အဝင်ပါဝါသည် အထွက်ပါဝါနှင့် မညီမျှပါ။သို့သော် စာအုပ်များကို မကြာခဏ စံနမူနာပြုထားပြီး input power သည် output power နှင့် ညီမျှသည်။ 
4. မော်တာပါဝါ (အဝင်ပါဝါ): 1) Single-phase မော်တာပါဝါတွက်ချက်မှုဖော်မြူလာ- P=U*I*cosφ၊ ပါဝါအချက်မှာ 0.8 ဖြစ်ပါက ဗို့အား 220V ဖြစ်ပြီး လက်ရှိမှာ 2A ဖြစ်ပြီး၊ ထို့နောက် ပါဝါ P=0.22×2×0.8=0.352KW ဖြစ်သည်။ 2) အဆင့်သုံး မော်တာပါဝါ တွက်ချက်မှု ဖော်မြူလာ- P=1.732*U*I*cosφ (cosφ သည် ပါဝါအချက်ဖြစ်ပြီး U သည် ဝန်လိုင်းဗို့အားဖြစ်ပြီး၊ ကျွန်ုပ်သည် ဝန်လိုင်းလက်ရှိဖြစ်သည်)။သို့သော် ဤအမျိုးအစား၏ U နှင့် I သည် မော်တာ၏ ချိတ်ဆက်မှုနှင့် ဆက်စပ်နေသည်။ star ချိတ်ဆက်မှုတွင်၊ 120° ဗို့အားဖြင့် ပိုင်းခြားထားသော ကွိုင်သုံးခု၏ ဘုံစွန်းများကို 0 point အဖြစ်ဖွဲ့စည်းရန် ချိတ်ဆက်ထားသောကြောင့်၊ load coil တွင် တင်ထားသော ဗို့အားသည် အမှန်တကယ်တွင် phase-to-phase ဖြစ်သည်။ မြစ်ဝကျွန်းပေါ် ချိတ်ဆက်မှုနည်းလမ်းကို အသုံးပြုသောအခါ၊ ကွိုင်တစ်ခုစီ၏ အဆုံးတစ်ခုစီသို့ ပါဝါလိုင်းတစ်ခု ချိတ်ဆက်ထားသောကြောင့် ဝန်ကွိုင်ရှိ ဗို့အားမှာ လိုင်းဗို့အားဖြစ်သည်။အသုံးများသော 3-phase 380V ဗို့အားကိုအသုံးပြုပါက coil သည် star connection တွင် 220V ဖြစ်ပြီး delta သည် 380V၊ P=U*I=U^2/R ဖြစ်သောကြောင့် delta connection တွင် power သည် star connection 3 ဆ၊ ထို့ကြောင့် ပါဝါမြင့်သော မော်တာသည် စတင်ရန် star-delta step-down ကို အသုံးပြုသည်။ အထက်ဖော်ပြပါ ပုံသေနည်းကို ကောင်းစွာနားလည်ပြီး မော်တာ၏နိယာမကို ရှုပ်ထွေးလိမ့်မည်မဟုတ်သလို မော်တော်မောင်းနှင်ခြင်း၏ အဆင့်မြင့်သင်တန်းကို သင်ယူရမှာကိုလည်း ကြောက်နေမည်မဟုတ်ပါ။ မော်တာ၏အခြားအစိတ်အပိုင်းများ 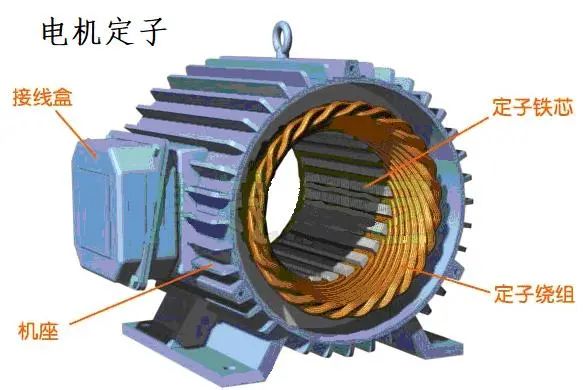
1) ပန်ကာ- မော်တာ၏အနောက်ဘက်တွင် ယေဘုယျအားဖြင့် မော်တာသို့အပူများသွန်းလောင်းရန်၊ 2) Junction box- AC three-phase asynchronous motor ကဲ့သို့သော power supply သို့ ချိတ်ဆက်ရာတွင် အသုံးပြုသည်၊ ၎င်းကို လိုအပ်ချက်အရ star သို့မဟုတ် delta သို့ ချိတ်ဆက်နိုင်သည်။ 3) Bearing- မော်တာ၏ လှည့်ပတ်ခြင်းနှင့် စာရေးကိရိယာ အစိတ်အပိုင်းများကို ချိတ်ဆက်ခြင်း၊ 4. အဆုံးအဖုံး- ရှေ့နှင့်နောက်အဖုံးများသည် မော်တာအပြင်ဘက်တွင် အထောက်အကူပြုသည့်အခန်းကဏ္ဍမှ ပါဝင်ပါသည်။
တင်ချိန်- ဇွန်လ ၁၃-၂၀၂၂ top