- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu




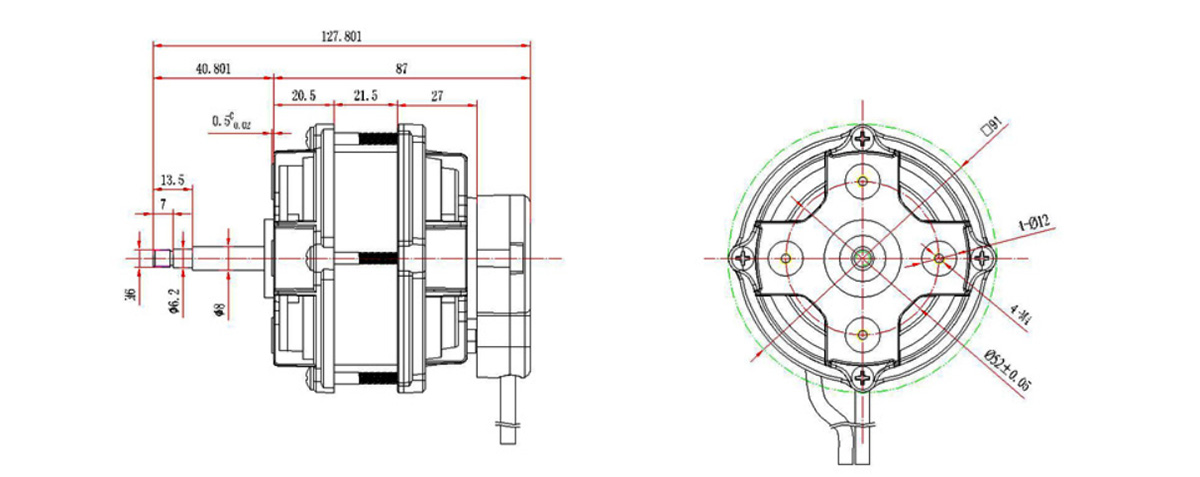
မီးဖိုချောင်စားဖိုမှူး ချက်ပြုတ်သည့် စက်ရုပ် ချက်ပြုတ်သည့်စက်ကို တွန့်ဆုတ်နေသော မော်တာသို့ ပြောင်းထားသည်။
မော်တာ ကန့်သတ်ချက်များ
| လည်ပတ်ဗို့အား | DC300V |
| လက်ရှိ အဆင့်သတ်မှတ်ထားသည်။ | 2.8±10%A |
| အများဆုံးလက်ရှိ | 5.4A |
| စတင်ဗို့အား | DC23V~25V |
| ပါဝါအဆင့်သတ်မှတ်ထားသည်။ | 700±10%W |
| အဆင့်သတ်မှတ်ထားသော မြန်နှုန်း | 35000±10% RPM |
| မလှုပ်မရှားပါဝါ | <100W |
| တိုင်အရေအတွက် | 2 |
| torque | 0.2NM |
| ထိရောက်မှု | 80%±10% |
| ကူးပြောင်းခြင်း။ | Axial CW |
| ဆူညံသံ | 96dB MAX၊<30cm |
| ကိုယ်အလေးချိန် | 1.68Kg |
| ကျမမှာ | ဘောလုံးဝက်ဝံ ၂ ခု |
| ထိန်းချုပ်မှု | ခန်းမအာရုံခံကိရိယာ |
| တပ်ဆင်ပါ။ | flange mount |
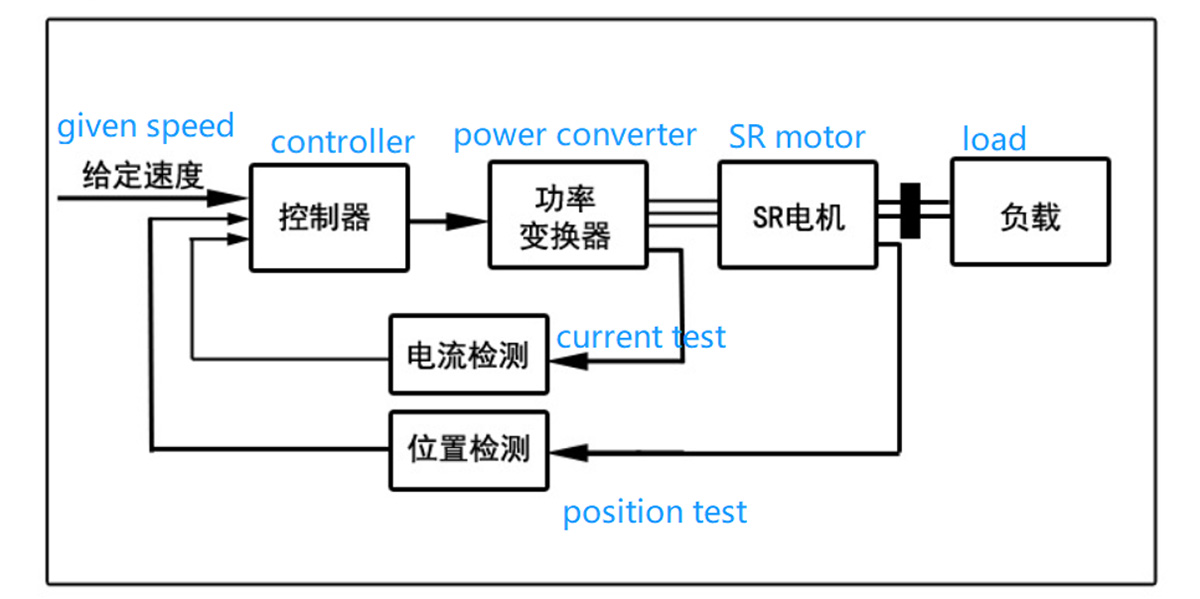
မော်တာဖွဲ့စည်းပုံ
1. switched တုံ့ဆိုင်းနေသောမော်တာမောင်းစနစ်၏ဖွဲ့စည်းမှု
Switched reluctance motor drive system (SRD) သည် အဓိကအားဖြင့် switched reluctance motor၊ power converter၊ controller နှင့် detector တို့ပါဝင်သည်။
၂။တွန့်ဆုတ်နေသော မော်တာကို ပြောင်းထားသည်။
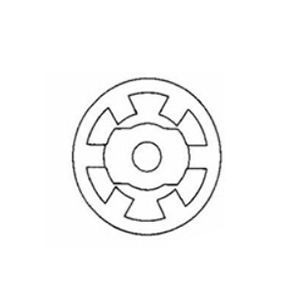
SR မော်တာများကို အဆင့်နံပါတ်များဖြင့် ကွဲပြားသော အဆင့်နံပါတ်များဖြင့် single-phase၊ two-phase၊ three-phase၊ 4-phase နှင့် multi-phase တည်ဆောက်ပုံများအဖြစ် ဒီဇိုင်းထုတ်နိုင်ပြီး တိုင်တစ်ခုလျှင် single-tooth structure နှင့် multi-tooth တည်ဆောက်ပုံ၊ axial air၊ gap, radial air gap နှင့် axial air gap တို့ ဖြစ်သည်။ radial hybrid air gap တည်ဆောက်ပုံ၊ အတွင်းရဟတ်နှင့် အပြင်ဘက်ရဟတ်ဖွဲ့စည်းပုံ၊ အဆင့်သုံးဆင့်အောက်ရှိ SR မော်တာများသည် ယေဘုယျအားဖြင့် အလိုအလျောက်စတင်နိုင်စွမ်းမရှိပါ။ အဆင့်များစွာသည် torque အတက်အကျကို လျှော့ချရန်အတွက် အကျိုးရှိသော်လည်း ၎င်းသည် ရှုပ်ထွေးသောဖွဲ့စည်းပုံ၊ ပင်မခလုတ်ပြောင်းကိရိယာများစွာနှင့် ကုန်ကျစရိတ်တိုးလာစေသည်။ လက်ရှိတွင်၊ အဆင့် 6/4-ဝင်ရိုးစွန်းတည်ဆောက်ပုံနှင့် လေးဆင့်အဆင့် 8/6 အဆင့်ဖွဲ့စည်းပုံတို့ကို တွင်ကျယ်စွာအသုံးပြုကြသည်။
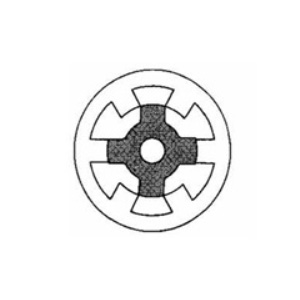
ပုံမှန်ဖွဲ့စည်းပုံ 3-အဆင့်
6/4 ပိုလာ SR မော်တာ
3 အဆင့် 6/2
ပိုလာ SR မော်တာ
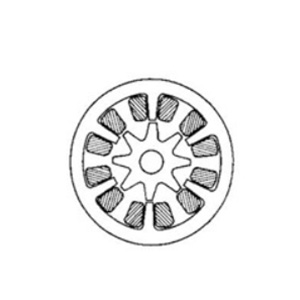
3 အဆင့် 6/8
ပိုလာ SR မော်တာ

3 အဆင့် 12/8
ပိုလာ SR မော်တာ
3. မော်တာနှင့် ယာဉ်မောင်းများ၏ ရုပ်ပိုင်းဆိုင်ရာ ဝါယာကြိုးပုံ
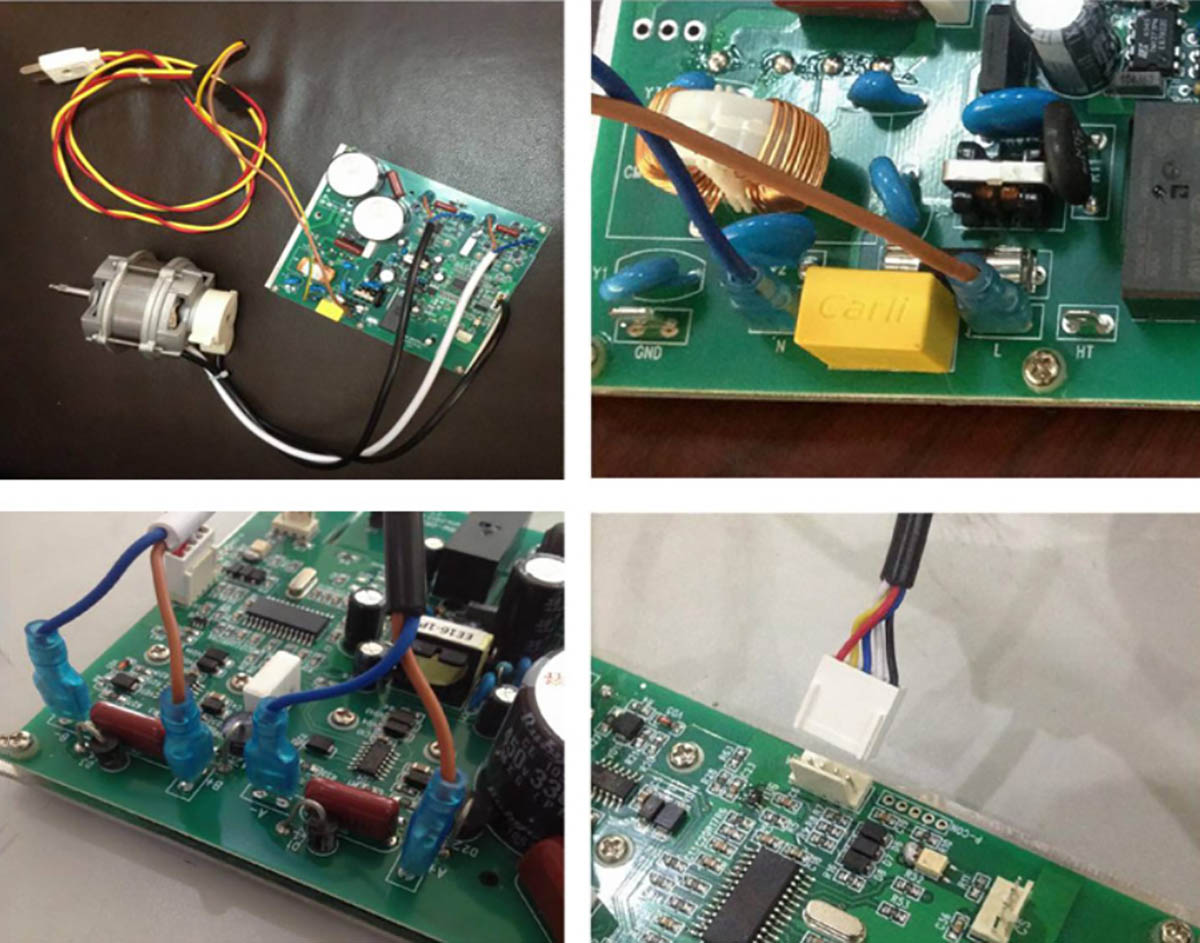
ကုန်ပစ္စည်းဓာတ်ပုံ


မော်တာအဆင့်ဝါယာကြိုး
အနက်ရောင် (အညို/A+ အပြာ/A-)၊ အဖြူ (အညို/A+ အပြာ/A-)၊ ဝါယာကြိုးအရှည် L=380 ± 50mm
Hall ဝါယာကြိုးများ
အနီရောင် (+5V), အနက်ရောင် (GND), အဝါ (SA), အပြာ (SB), အဖြူရောင် (SC), လိုင်းအလျား L= လိုင်းအရှည် L=380 ± 50mm
သိုလှောင်မှု- 5 ℃ ~ 40 ℃၊ စိုထိုင်းဆ < 90%
လျှပ်ကာအမျိုးအစား- F
သတ်မှတ်ထားသောဗို့အား၏ 130% တွင် Crack-free coil သည် 3 မိနစ်ကြာသည်။
ပုံမှန်အလုပ်အခြေအနေအောက်တွင် နာရီ 2000 အလုပ်လုပ်သည်။
မော်တာလည်ပတ်နေချိန်တွင် axial displacement သည် 0.02mm ထက်နည်းသင့်သည်။
မော်တာ၏လက္ခဏာများ
1.မြင့်မားသောစနစ်ထိရောက်မှု- ၎င်း၏ကျယ်ပြန့်သောအမြန်နှုန်းစည်းမျဉ်းဘောင်တွင်၊ အလုံးစုံထိရောက်မှုမှာ အခြားအမြန်နှုန်းထိန်းညှိစနစ်များထက် အနည်းဆုံး 10% မြင့်မားပြီး စွမ်းဆောင်ရည်မြင့်မားမှုသည် နိမ့်သောအမြန်နှုန်းနှင့် အဆင့်သတ်မှတ်မဟုတ်သောဝန်တွင် ပိုမိုထင်ရှားသည်။
2.ကျယ်ပြန့်သောအမြန်နှုန်းစည်းမျဉ်း၊ နိမ့်သောအမြန်နှုန်းဖြင့် ရေရှည်လုပ်ဆောင်မှု- ၎င်းသည် သုညမှအမြင့်ဆုံးအမြန်နှုန်းအကွာအဝေးအတွင်း ဝန်အောက်တွင် အချိန်ကြာမြင့်စွာ လည်ပတ်နိုင်ပြီး မော်တာနှင့် ထိန်းချုပ်ကိရိယာ၏ အပူချိန်မြင့်တက်မှုသည် အဆင့်သတ်မှတ်ထားသောဝန်ထက် နိမ့်သည်။
၃။မြင့်မားသောစတင် torque၊ low start current- စတင် torque သည် အဆင့်သတ်မှတ်ထားသော torque ၏ 150% သို့ရောက်ရှိသောအခါ၊ စတင်သည့်လက်ရှိသည် rated current ၏ 30% သာဖြစ်သည်။
4. ၎င်းသည် မကြာခဏ စတင်ခြင်းနှင့် ရပ်တန့်နိုင်ပြီး ရှေ့နှင့် နောက်ပြန်လှည့်ခြင်းအကြား ပြောင်းနိုင်သည်- ၎င်းသည် မကြာခဏ စတင်ခြင်းနှင့် ရပ်တန့်နိုင်ပြီး ရှေ့နှင့် နောက်ပြန်လှည့်ခြင်းကြား မကြာခဏပြောင်းနိုင်သည်။ ဘရိတ်ယူနစ်တစ်ခုရှိ၍ ဘရိတ်ပါဝါသည် အချိန်လိုအပ်ချက်နှင့် ကိုက်ညီသောအခါ၊ စတင်-ရပ်တန့်ခြင်းနှင့် ရှေ့-နောက်ပြန်လှည့်ခြင်းတို့သည် တစ်နာရီလျှင် အကြိမ် 1,000 ကျော်ရောက်ရှိနိုင်သည်။
5. ပြင်းထန်သော ဝန်ပိုနိုင်စွမ်း- ဝန်သည် အချိန်တိုအတွင်း သတ်မှတ်ပေးထားသည့် ဝန်ထက် များစွာပိုကြီးလာသောအခါ၊ အရှိန်ကျသွားမည်ဖြစ်ပြီး၊ အများဆုံးထွက်ရှိနိုင်သော ပါဝါကို ထိန်းသိမ်းထားမည်ဖြစ်ပြီး၊ overcurrent ဖြစ်စဉ်လည်း ရှိမည်မဟုတ်ပါ။ ဝန်ပုံမှန်ပြန်သွားသောအခါ၊ မြန်နှုန်းသည် သတ်မှတ်အမြန်နှုန်းသို့ ပြန်သွားပါသည်။
6.စက်ပိုင်းဆိုင်ရာအားနှင့် ယုံကြည်စိတ်ချရမှုသည် အခြားမော်တာအမျိုးအစားများထက် ပိုမိုမြင့်မားသည်။ ရဟတ်တွင် အမြဲတမ်း သံလိုက်များ မပါရှိဘဲ အပူချိန် မြင့်တက်လာနိုင်သည်။
လျှောက်လွှာ
ပန်ကာနှင့် ဟင်းချက်စက်
ထုတ်ကုန်အမျိုးအစားများ
-

g အတွက် 10kw 96V AC မော်တာနှင့် controller တပ်ဆင်ခြင်း...
-

စွမ်းအင်အသစ်တွဲဖက်တွင်အသုံးပြုသော Switched တွန့်ဆုတ်သောမော်တာ...
-

10kw 72v AC Motor လျှပ်စစ်ကားဘတ်စ်အဖြစ်ပြောင်းလဲခြင်း K...
-

1.2k 32V AC လျှပ်စစ် synchronous မော်တာအစိတ်အပိုင်းများ...
-
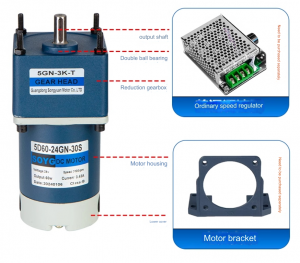
5D60-24GU-30S 12v24v DC လျှော့ချမော်တာ
-

1.2k 32V AC လျှပ်စစ် synchronous မော်တာအစိတ်အပိုင်းများ...