ຍານພາຫະນະໄຟຟ້າສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍສາມພາກສ່ວນ: ລະບົບຂັບເຄື່ອນມໍເຕີ, ລະບົບຫມໍ້ໄຟແລະລະບົບການຄວບຄຸມຍານພາຫະນະ. ລະບົບຂັບເຄື່ອນມໍເຕີແມ່ນສ່ວນຫນຶ່ງທີ່ປ່ຽນພະລັງງານໄຟຟ້າໂດຍກົງເປັນພະລັງງານກົນຈັກ, ເຊິ່ງກໍານົດຕົວຊີ້ວັດການປະຕິບັດຂອງຍານພາຫະນະໄຟຟ້າ. ດັ່ງນັ້ນ, ການເລືອກມໍເຕີໄດແມ່ນມີຄວາມສໍາຄັນໂດຍສະເພາະ.
ໃນການປົກປັກຮັກສາສິ່ງແວດລ້ອມ, ຍານພາຫະນະໄຟຟ້າຍັງໄດ້ກາຍເປັນຈຸດສຸມການຄົ້ນຄວ້າໃນຊຸມປີມໍ່ໆມານີ້. ຍານພາຫະນະໄຟຟ້າສາມາດບັນລຸການປ່ອຍອາຍພິດສູນຫຼືຕ່ໍາຫຼາຍໃນການຈະລາຈອນໃນຕົວເມືອງ, ແລະມີປະໂຫຍດອັນໃຫຍ່ຫຼວງໃນດ້ານການປົກປ້ອງສິ່ງແວດລ້ອມ. ທຸກໆປະເທດກໍາລັງເຮັດວຽກຫນັກເພື່ອພັດທະນາຍານພາຫະນະໄຟຟ້າ. ຍານພາຫະນະໄຟຟ້າສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍສາມພາກສ່ວນ: ລະບົບຂັບເຄື່ອນມໍເຕີ, ລະບົບຫມໍ້ໄຟແລະລະບົບການຄວບຄຸມຍານພາຫະນະ. ລະບົບຂັບເຄື່ອນມໍເຕີແມ່ນສ່ວນຫນຶ່ງທີ່ປ່ຽນພະລັງງານໄຟຟ້າໂດຍກົງເປັນພະລັງງານກົນຈັກ, ເຊິ່ງກໍານົດຕົວຊີ້ວັດການປະຕິບັດຂອງຍານພາຫະນະໄຟຟ້າ. ດັ່ງນັ້ນ, ການເລືອກມໍເຕີໄດແມ່ນມີຄວາມສໍາຄັນໂດຍສະເພາະ.
1. ຂໍ້ກໍານົດສໍາລັບຍານພາຫະນະໄຟຟ້າສໍາລັບມໍເຕີຂັບ
ໃນປັດຈຸບັນ, ການປະເມີນຜົນການປະຕິບັດຍານພາຫະນະໄຟຟ້າສ່ວນໃຫຍ່ແມ່ນພິຈາລະນາສາມຕົວຊີ້ວັດການປະຕິບັດດັ່ງຕໍ່ໄປນີ້:
(1) ໄລຍະທາງສູງສຸດ (ກມ): ໄລຍະທາງສູງສຸດຂອງຍານພາຫະນະໄຟຟ້າຫຼັງຈາກຫມໍ້ໄຟຖືກສາກໄຟເຕັມ;
(2) ຄວາມສາມາດໃນການເລັ່ງ (s): ທີ່ໃຊ້ເວລາຕໍາ່ສຸດທີ່ຕ້ອງການສໍາລັບຍານພາຫະນະໄຟຟ້າເພື່ອເລັ່ງຈາກການຢຸດເຊົາການກັບຄວາມໄວສະເພາະໃດຫນຶ່ງ;
(3) ຄວາມໄວສູງສຸດ (ກມ/ຊມ): ຄວາມໄວສູງສຸດທີ່ລົດໄຟຟ້າສາມາດບັນລຸໄດ້.
ມໍເຕີທີ່ອອກແບບມາສໍາລັບລັກສະນະການຂັບຂີ່ຂອງຍານພາຫະນະໄຟຟ້າມີຄວາມຕ້ອງການປະສິດທິພາບພິເສດເມື່ອທຽບກັບມໍເຕີອຸດສາຫະກໍາ:
(1) ມໍເຕີຂັບລົດໄຟຟ້າໂດຍປົກກະຕິຮຽກຮ້ອງໃຫ້ມີຄວາມຕ້ອງການການປະຕິບັດການເຄື່ອນໄຫວສູງສໍາລັບການເລີ່ມຕົ້ນ / ຢຸດເລື້ອຍໆ, ການເລັ່ງ / deceleration, ແລະການຄວບຄຸມແຮງບິດ;
(2) ເພື່ອຫຼຸດຜ່ອນນ້ໍາຫນັກຂອງຍານພາຫະນະທັງຫມົດ, ລະບົບສາຍສົ່ງຫຼາຍຄວາມໄວມັກຈະຖືກຍົກເລີກ, ເຊິ່ງຮຽກຮ້ອງໃຫ້ມໍເຕີສາມາດສະຫນອງແຮງບິດທີ່ສູງຂຶ້ນໃນຄວາມໄວຕ່ໍາຫຼືໃນເວລາທີ່ປີນຄ້ອຍ, ແລະປົກກະຕິແລ້ວສາມາດທົນທານຕໍ່ 4-5 ເທື່ອ. overload ໄດ້;
(3) ລະດັບການກໍານົດຄວາມໄວແມ່ນຕ້ອງການໃຫ້ມີຂະຫນາດໃຫຍ່ເທົ່າທີ່ເປັນໄປໄດ້, ແລະໃນເວລາດຽວກັນ, ມັນຈໍາເປັນຕ້ອງຮັກສາປະສິດທິພາບການເຮັດວຽກສູງພາຍໃນຂອບເຂດກົດລະບຽບຄວາມໄວທັງຫມົດ;
(4) ມໍເຕີໄດ້ຖືກອອກແບບເພື່ອໃຫ້ມີຄວາມໄວສູງສຸດເທົ່າທີ່ເປັນໄປໄດ້, ແລະໃນເວລາດຽວກັນ, ທໍ່ອາລູມິນຽມໂລຫະປະສົມຖືກນໍາໃຊ້ຫຼາຍເທົ່າທີ່ເປັນໄປໄດ້. ມໍເຕີຄວາມໄວສູງມີຂະຫນາດຂະຫນາດນ້ອຍ, ເຊິ່ງເຮັດໃຫ້ການຫຼຸດຜ່ອນນ້ໍາຫນັກຂອງຍານພາຫະນະໄຟຟ້າ;
(5) ຍານພາຫະນະໄຟຟ້າຄວນຈະມີການນໍາໃຊ້ພະລັງງານທີ່ດີທີ່ສຸດແລະມີຫນ້າທີ່ຂອງການຟື້ນຕົວພະລັງງານເບກ. ພະລັງງານທີ່ຟື້ນຕົວໂດຍການເບກແບບຟື້ນຟູໂດຍທົ່ວໄປຄວນຈະບັນລຸ 10%-20% ຂອງພະລັງງານທັງຫມົດ;
(6) ສະພາບແວດລ້ອມການເຮັດວຽກຂອງມໍເຕີທີ່ໃຊ້ໃນຍານພາຫະນະໄຟຟ້າແມ່ນມີຄວາມຊັບຊ້ອນແລະຮຸນແຮງຫຼາຍ, ຮຽກຮ້ອງໃຫ້ມໍເຕີມີຄວາມຫນ້າເຊື່ອຖືທີ່ດີແລະການປັບຕົວຂອງສິ່ງແວດລ້ອມ, ແລະໃນເວລາດຽວກັນເພື່ອຮັບປະກັນວ່າຄ່າໃຊ້ຈ່າຍໃນການຜະລິດມໍເຕີບໍ່ສາມາດສູງເກີນໄປ.
2. ເຄື່ອງຈັກຂັບທີ່ໃຊ້ທົ່ວໄປຫຼາຍອັນ
2.1 ມໍເຕີ DC
ໃນໄລຍະຕົ້ນຂອງການພັດທະນາຍານພາຫະນະໄຟຟ້າ, ຍານພາຫະນະໄຟຟ້າສ່ວນໃຫຍ່ໃຊ້ມໍເຕີ DC ເປັນມໍເຕີຂັບເຄື່ອນ. ປະເພດຂອງເທກໂນໂລຍີມໍເຕີນີ້ແມ່ນຂ້ອນຂ້າງແກ່, ມີວິທີການຄວບຄຸມໄດ້ງ່າຍແລະລະບຽບການຄວາມໄວທີ່ດີເລີດ. ມັນເຄີຍຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງທີ່ສຸດໃນພາກສະຫນາມຂອງມໍເຕີຄວບຄຸມຄວາມໄວ. . ຢ່າງໃດກໍ່ຕາມ, ເນື່ອງຈາກໂຄງສ້າງກົນຈັກທີ່ສັບສົນຂອງມໍເຕີ DC, ເຊັ່ນ: ແປງແລະເຄື່ອງປ່ຽນກົນຈັກ, ຄວາມອາດສາມາດ overload ທັນທີແລະການເພີ່ມຄວາມໄວຂອງມໍເຕີແມ່ນຈໍາກັດ, ແລະໃນກໍລະນີຂອງການເຮັດວຽກໃນໄລຍະຍາວ, ໂຄງສ້າງກົນຈັກຂອງ. motor ຈະ ສູນ ເສຍ ແມ່ນ ການ ຜະ ລິດ ແລະ ຄ່າ ໃຊ້ ຈ່າຍ ໃນ ການ ບໍາ ລຸງ ຮັກ ສາ ແມ່ນ ເພີ່ມ ຂຶ້ນ. ນອກຈາກນັ້ນ, ໃນເວລາທີ່ມໍເຕີກໍາລັງແລ່ນ, sparks ຈາກແປງເຮັດໃຫ້ rotor ຮ້ອນຂຶ້ນ, ພະລັງງານເສຍ, ເຮັດໃຫ້ມັນມີຄວາມຫຍຸ້ງຍາກທີ່ຈະ dissipation ຄວາມຮ້ອນ, ແລະຍັງເຮັດໃຫ້ເກີດການລົບກວນແມ່ເຫຼັກໄຟຟ້າຄວາມຖີ່ສູງ, ສົ່ງຜົນກະທົບຕໍ່ປະສິດທິພາບຂອງຍານພາຫະນະ. ເນື່ອງຈາກຂໍ້ບົກຜ່ອງຂ້າງເທິງຂອງມໍເຕີ DC, ຍານພາຫະນະໄຟຟ້າໃນປະຈຸບັນໄດ້ກໍາຈັດມໍເຕີ DC ໂດຍພື້ນຖານ.
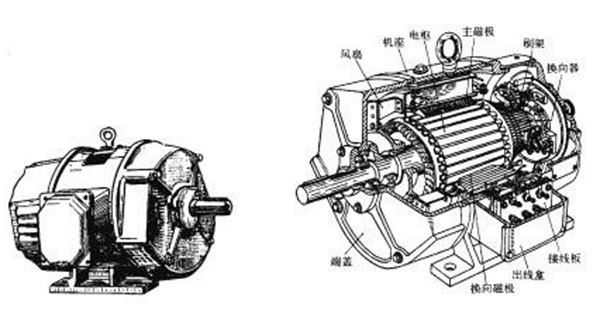
2.2 AC asynchronous motor
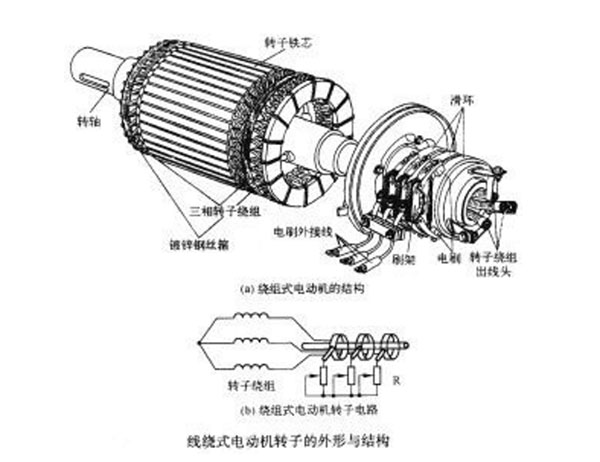
ມໍເຕີ asynchronous AC ແມ່ນປະເພດຂອງມໍເຕີທີ່ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸດສາຫະກໍາ. ມັນມີລັກສະນະທີ່ stator ແລະ rotor ແມ່ນ laminated ໂດຍແຜ່ນເຫຼັກຊິລິຄອນ. ທັງສອງສົ້ນໄດ້ຖືກຫຸ້ມຫໍ່ດ້ວຍຝາອາລູມິນຽມ. , ການດໍາເນີນງານທີ່ເຊື່ອຖືໄດ້ແລະທົນທານ, ການບໍາລຸງຮັກສາງ່າຍ. ເມື່ອປຽບທຽບກັບມໍເຕີ DC ຂອງພະລັງງານດຽວກັນ, ມໍເຕີ asynchronous AC ແມ່ນມີປະສິດທິພາບຫຼາຍ, ແລະມະຫາຊົນແມ່ນປະມານຫນຶ່ງເຄິ່ງຫນຶ່ງຂອງສີມ້ານ. ຖ້າວິທີການຄວບຄຸມຂອງການຄວບຄຸມ vector ໄດ້ຖືກຮັບຮອງເອົາ, ຄວາມສາມາດໃນການຄວບຄຸມແລະລະດັບການຄວບຄຸມຄວາມໄວທີ່ກວ້າງຂວາງທຽບກັບມໍເຕີ DC ສາມາດໄດ້ຮັບ. ເນື່ອງຈາກຂໍ້ໄດ້ປຽບຂອງປະສິດທິພາບສູງ, ພະລັງງານສະເພາະສູງ, ແລະຄວາມເຫມາະສົມກັບການດໍາເນີນງານຄວາມໄວສູງ, ມໍເຕີ asynchronous AC ເປັນມໍເຕີທີ່ໃຊ້ກັນຢ່າງກວ້າງຂວາງທີ່ສຸດໃນຍານພາຫະນະໄຟຟ້າທີ່ມີພະລັງງານສູງ. ໃນປັດຈຸບັນ, ມໍເຕີ asynchronous AC ໄດ້ຖືກຜະລິດເປັນຂະຫນາດໃຫຍ່, ແລະມີປະເພດຕ່າງໆຂອງຜະລິດຕະພັນສໍາລັບຜູ້ໃຫຍ່ທີ່ຈະເລືອກເອົາ. ຢ່າງໃດກໍຕາມ, ໃນກໍລະນີຂອງການດໍາເນີນງານຄວາມໄວສູງ, rotor ຂອງມໍເຕີໄດ້ຮັບຄວາມຮ້ອນຢ່າງຈິງຈັງ, ແລະມໍເຕີຕ້ອງໄດ້ຮັບການເຢັນໃນລະຫວ່າງການປະຕິບັດງານ. ໃນເວລາດຽວກັນ, ລະບົບຂັບແລະການຄວບຄຸມຂອງມໍເຕີ asynchronous ແມ່ນສັບສົນຫຼາຍ, ແລະຄ່າໃຊ້ຈ່າຍຂອງຮ່າງກາຍມໍເຕີກໍ່ສູງ. ເມື່ອປຽບທຽບກັບມໍເຕີສະກົດຈິດຖາວອນແລະການປ່ຽນໃຈເຫລື້ອມໃສຂອງມໍເຕີ, ປະສິດທິພາບແລະຄວາມຫນາແຫນ້ນຂອງພະລັງງານຂອງມໍເຕີ asynchronous ແມ່ນຕ່ໍາ, ເຊິ່ງບໍ່ເອື້ອອໍານວຍໃນການປັບປຸງ mileage ສູງສຸດຂອງຍານພາຫະນະໄຟຟ້າ.
2.3 ມໍເຕີແມ່ເຫຼັກຖາວອນ
ມໍເຕີແມ່ເຫຼັກຖາວອນສາມາດແບ່ງອອກເປັນສອງປະເພດຕາມຮູບແບບຂອງຄື້ນໃນປະຈຸບັນທີ່ແຕກຕ່າງກັນຂອງ stator windings, ຫນຶ່ງແມ່ນ motor DC brushless, ທີ່ມີຄື້ນກໍາມະຈອນສີ່ຫລ່ຽມມຸມສາກ; ອີກອັນຫນຶ່ງແມ່ນມໍເຕີ synchronous ສະກົດຈິດຖາວອນ, ທີ່ມີກະແສຄື້ນ sine. ທັງສອງປະເພດຂອງມໍເຕີແມ່ນພື້ນຖານດຽວກັນໃນໂຄງສ້າງແລະຫຼັກການການເຮັດວຽກ. rotors ແມ່ນແມ່ເຫຼັກຖາວອນ, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນການສູນເສຍທີ່ເກີດຈາກຄວາມຕື່ນເຕັ້ນ. stator ໄດ້ຖືກຕິດຕັ້ງດ້ວຍ windings ເພື່ອສ້າງແຮງບິດໂດຍຜ່ານກະແສໄຟຟ້າສະຫຼັບ, ສະນັ້ນການເຢັນແມ່ນຂ້ອນຂ້າງງ່າຍ. ເນື່ອງຈາກວ່າມໍເຕີປະເພດນີ້ບໍ່ຈໍາເປັນຕ້ອງຕິດຕັ້ງແປງແລະໂຄງສ້າງທາງກົນຈັກ, ບໍ່ມີ sparks commutation ຈະຖືກສ້າງຂຶ້ນໃນລະຫວ່າງການປະຕິບັດງານ, ການດໍາເນີນງານແມ່ນປອດໄພແລະເຊື່ອຖືໄດ້, ການບໍາລຸງຮັກສາແມ່ນສະດວກ, ແລະອັດຕາການໃຊ້ພະລັງງານແມ່ນສູງ.
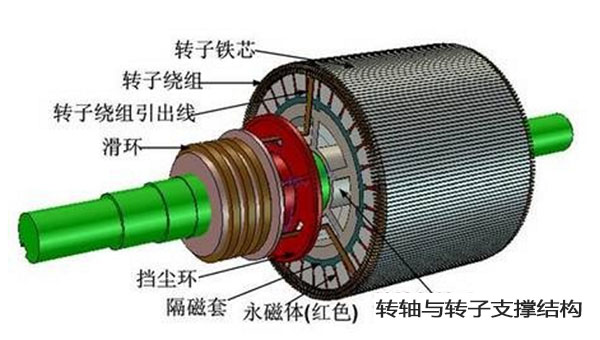
ລະບົບການຄວບຄຸມຂອງມໍເຕີແມ່ເຫຼັກຖາວອນແມ່ນງ່າຍດາຍກວ່າລະບົບການຄວບຄຸມຂອງມໍເຕີ asynchronous AC. ຢ່າງໃດກໍ່ຕາມ, ເນື່ອງຈາກຂໍ້ຈໍາກັດຂອງຂະບວນການວັດສະດຸແມ່ເຫຼັກຖາວອນ, ລະດັບພະລັງງານຂອງມໍເຕີແມ່ເຫຼັກຖາວອນແມ່ນຂະຫນາດນ້ອຍ, ແລະພະລັງງານສູງສຸດໂດຍທົ່ວໄປແມ່ນມີພຽງແຕ່ສິບລ້ານ, ເຊິ່ງເປັນຂໍ້ເສຍທີ່ໃຫຍ່ທີ່ສຸດຂອງມໍເຕີແມ່ເຫຼັກຖາວອນ. ໃນເວລາດຽວກັນ, ອຸປະກອນການສະກົດຈິດຖາວອນກ່ຽວກັບ rotor ຈະມີປະກົດການເສື່ອມສະນະແມ່ເຫຼັກພາຍໃຕ້ເງື່ອນໄຂຂອງອຸນຫະພູມສູງ, ການສັ່ນສະເທືອນແລະ overcurrent, ດັ່ງນັ້ນພາຍໃຕ້ສະພາບການເຮັດວຽກທີ່ຂ້ອນຂ້າງສະລັບສັບຊ້ອນ, ມໍເຕີແມ່ເຫຼັກຖາວອນແມ່ນມີຄວາມສ່ຽງຕໍ່ຄວາມເສຍຫາຍ. ຍິ່ງໄປກວ່ານັ້ນ, ລາຄາຂອງວັດສະດຸແມ່ເຫຼັກຖາວອນແມ່ນສູງ, ດັ່ງນັ້ນຄ່າໃຊ້ຈ່າຍຂອງມໍເຕີທັງຫມົດແລະລະບົບການຄວບຄຸມຂອງມັນແມ່ນສູງ.
2.4 Switched Reluctance Motor
ໃນຖານະເປັນມໍເຕີປະເພດໃຫມ່, motor reluctance switched ມີໂຄງສ້າງທີ່ງ່າຍດາຍທີ່ສຸດເມື່ອທຽບກັບ motors ຂັບປະເພດອື່ນໆ. stator ແລະ rotor ແມ່ນທັງສອງໂຄງສ້າງສອງເທົ່າທີ່ເຮັດຈາກແຜ່ນເຫຼັກຊິລິຄອນທໍາມະດາ. ບໍ່ມີໂຄງສ້າງຢູ່ໃນ rotor. stator ແມ່ນອຸປະກອນທີ່ມີ winding ເຂັ້ມຂຸ້ນງ່າຍດາຍ, ເຊິ່ງມີຂໍ້ດີຫຼາຍເຊັ່ນໂຄງສ້າງງ່າຍດາຍແລະແຂງ, ຄວາມຫນ້າເຊື່ອຖືສູງ, ນ້ໍາຫນັກເບົາ, ຄ່າໃຊ້ຈ່າຍຕ່ໍາ, ປະສິດທິພາບສູງ, ອຸນຫະພູມຕ່ໍາ, ແລະການບໍາລຸງຮັກສາງ່າຍ. ຍິ່ງໄປກວ່ານັ້ນ, ມັນມີຄຸນລັກສະນະທີ່ດີເລີດຂອງການຄວບຄຸມທີ່ດີຂອງລະບົບຄວບຄຸມຄວາມໄວຂອງ DC, ແລະເຫມາະສົມກັບສະພາບແວດລ້ອມທີ່ຮຸນແຮງ, ແລະເຫມາະສົມທີ່ສຸດສໍາລັບການນໍາໃຊ້ເປັນມໍເຕີຂັບເຄື່ອນສໍາລັບຍານພາຫະນະໄຟຟ້າ.

ພິຈາລະນາວ່າເປັນມໍເຕີຂັບເຄື່ອນຂອງຍານພາຫະນະໄຟຟ້າ, ມໍເຕີ DC ແລະມໍເຕີແມ່ເຫຼັກຖາວອນມີການປັບຕົວທີ່ບໍ່ດີໃນໂຄງສ້າງແລະສະພາບແວດລ້ອມການເຮັດວຽກທີ່ສັບສົນ, ແລະມີຄວາມສ່ຽງຕໍ່ຄວາມລົ້ມເຫຼວຂອງກົນຈັກແລະ demagnetization, ເອກະສານສະບັບນີ້ເນັ້ນໃສ່ການແນະນໍາມໍເຕີສະຫຼັບທີ່ບໍ່ລັງເລໃຈແລະມໍເຕີ asynchronous AC. ເມື່ອປຽບທຽບກັບເຄື່ອງຈັກ, ມັນມີຄວາມໄດ້ປຽບຢ່າງຈະແຈ້ງໃນລັກສະນະຕໍ່ໄປນີ້.
2.4.1 ໂຄງສ້າງຂອງຮ່າງກາຍມໍເຕີ
ໂຄງປະກອບການຂອງມໍເຕີ reluctance ສະຫຼັບແມ່ນງ່າຍດາຍກ່ວາຂອງມໍເຕີ induction ກະຮອກ-cage. ຂໍ້ໄດ້ປຽບທີ່ໂດດເດັ່ນຂອງມັນແມ່ນວ່າບໍ່ມີການ winding ສຸດ rotor, ແລະມັນພຽງແຕ່ເຮັດດ້ວຍແຜ່ນເຫຼັກຊິລິຄອນທໍາມະດາ. ສ່ວນໃຫຍ່ຂອງການສູນເສຍມໍເຕີທັງຫມົດແມ່ນສຸມໃສ່ການ winding stator, ເຊິ່ງເຮັດໃຫ້ມໍເຕີງ່າຍດາຍໃນການຜະລິດ, ມີ insulation ດີ, ງ່າຍທີ່ຈະເຢັນ, ແລະມີລັກສະນະການກະຈາຍຄວາມຮ້ອນທີ່ດີເລີດ. ໂຄງສ້າງມໍເຕີນີ້ສາມາດຫຼຸດຜ່ອນຂະຫນາດແລະນ້ໍາຫນັກຂອງມໍເຕີ, ແລະສາມາດໄດ້ຮັບດ້ວຍປະລິມານຂະຫນາດນ້ອຍ. ພະລັງງານຜົນຜະລິດຂະຫນາດໃຫຍ່. ເນື່ອງຈາກຄວາມຍືດຫຍຸ່ນຂອງກົນຈັກທີ່ດີຂອງ rotor motor, motors reluctance switched ສາມາດຖືກນໍາໃຊ້ສໍາລັບການດໍາເນີນງານຄວາມໄວສູງ.
2.4.2 ວົງຈອນຂັບຂອງມໍເຕີ
ໄລຍະປະຈຸບັນຂອງລະບົບຂັບ motor reluctance ສະຫຼັບແມ່ນ unidirectional ແລະບໍ່ມີຫຍັງກ່ຽວຂ້ອງກັບທິດທາງຂອງແຮງບິດ, ແລະພຽງແຕ່ຫນຶ່ງອຸປະກອນສະຫຼັບຕົ້ນຕໍສາມາດນໍາໃຊ້ເພື່ອຕອບສະຫນອງສະພາບການເຮັດວຽກສີ່ສີ່ສີ່ຫລ່ຽມຂອງມໍເຕີ. ວົງຈອນແປງພະລັງງານແມ່ນເຊື່ອມຕໍ່ໂດຍກົງເປັນຊຸດດ້ວຍການກະຕຸ້ນຂອງ motor winding, ແລະແຕ່ລະໄລຍະວົງຈອນສະຫນອງພະລັງງານເປັນເອກະລາດ. ເຖິງແມ່ນວ່າການ winding ໄລຍະທີ່ແນ່ນອນຫຼືຕົວຄວບຄຸມຂອງມໍເຕີລົ້ມເຫລວ, ມັນພຽງແຕ່ຕ້ອງການຢຸດການເຮັດວຽກຂອງໄລຍະໂດຍບໍ່ມີການເຮັດໃຫ້ເກີດຜົນກະທົບຫຼາຍ. ດັ່ງນັ້ນ, ທັງຮ່າງກາຍຂອງມໍເຕີແລະຕົວແປງພະລັງງານແມ່ນມີຄວາມປອດໄພແລະເຊື່ອຖືໄດ້, ດັ່ງນັ້ນພວກມັນແມ່ນເຫມາະສົມສໍາລັບການນໍາໃຊ້ໃນສະພາບແວດລ້ອມທີ່ຮຸນແຮງກວ່າເຄື່ອງຈັກ asynchronous.
2.4.3 ດ້ານປະສິດທິພາບຂອງລະບົບມໍເຕີ
ມໍເຕີສະຫຼັບຄວາມລັງເລມີຕົວກໍານົດການຄວບຄຸມຫຼາຍ, ແລະມັນງ່າຍທີ່ຈະຕອບສະຫນອງຄວາມຕ້ອງການຂອງການດໍາເນີນການສີ່ສີ່ຫລ່ຽມຂອງຍານພາຫະນະໄຟຟ້າໂດຍຜ່ານຍຸດທະສາດການຄວບຄຸມທີ່ເຫມາະສົມແລະການອອກແບບລະບົບ, ແລະສາມາດຮັກສາຄວາມສາມາດໃນການຫ້າມລໍ້ທີ່ດີເລີດໃນເຂດປະຕິບັດງານຄວາມໄວສູງ. ມໍເຕີສະຫຼັບຄວາມລັງເລບໍ່ພຽງແຕ່ມີປະສິດຕິພາບສູງ, ແຕ່ຍັງຮັກສາປະສິດທິພາບສູງໃນໄລຍະຄວາມກ້ວາງຂອງລະບຽບຄວາມໄວ, ເຊິ່ງແມ່ນ unmatched ກັບປະເພດອື່ນໆຂອງລະບົບຂັບ motor. ການປະຕິບັດນີ້ແມ່ນເຫມາະສົມສໍາລັບການດໍາເນີນງານຂອງຍານພາຫະນະໄຟຟ້າ, ແລະເປັນປະໂຫຍດຫຼາຍເພື່ອປັບປຸງລະດັບ cruising ຂອງຍານພາຫະນະໄຟຟ້າ.
3. ບົດສະຫຼຸບ
ຈຸດສຸມຂອງເອກະສານນີ້ແມ່ນເພື່ອຍົກໃຫ້ເຫັນຂໍ້ໄດ້ປຽບຂອງ motor reluctance ສະຫຼັບເປັນມໍເຕີຂັບເຄື່ອນສໍາລັບຍານພາຫະນະໄຟຟ້າໂດຍການປຽບທຽບລະບົບຄວບຄຸມຄວາມໄວຂອງ motor drive ທີ່ໃຊ້ທົ່ວໄປຕ່າງໆ, ເຊິ່ງເປັນຈຸດສໍາຄັນຂອງການຄົ້ນຄວ້າໃນການພັດທະນາຍານພາຫະນະໄຟຟ້າ. ສໍາລັບປະເພດຂອງມໍເຕີພິເສດນີ້, ຍັງມີຫຼາຍຫ້ອງສໍາລັບການພັດທະນາໃນການນໍາໃຊ້ພາກປະຕິບັດ. ນັກຄົ້ນຄວ້າຈໍາເປັນຕ້ອງໄດ້ພະຍາຍາມເພີ່ມເຕີມເພື່ອດໍາເນີນການຄົ້ນຄ້ວາທິດສະດີ, ແລະໃນເວລາດຽວກັນ, ມັນຈໍາເປັນຕ້ອງສົມທົບກັບຄວາມຕ້ອງການຂອງຕະຫຼາດເພື່ອສົ່ງເສີມການນໍາໃຊ້ມໍເຕີປະເພດນີ້ໃນການປະຕິບັດ.
ເວລາປະກາດ: 24-03-2022