- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu




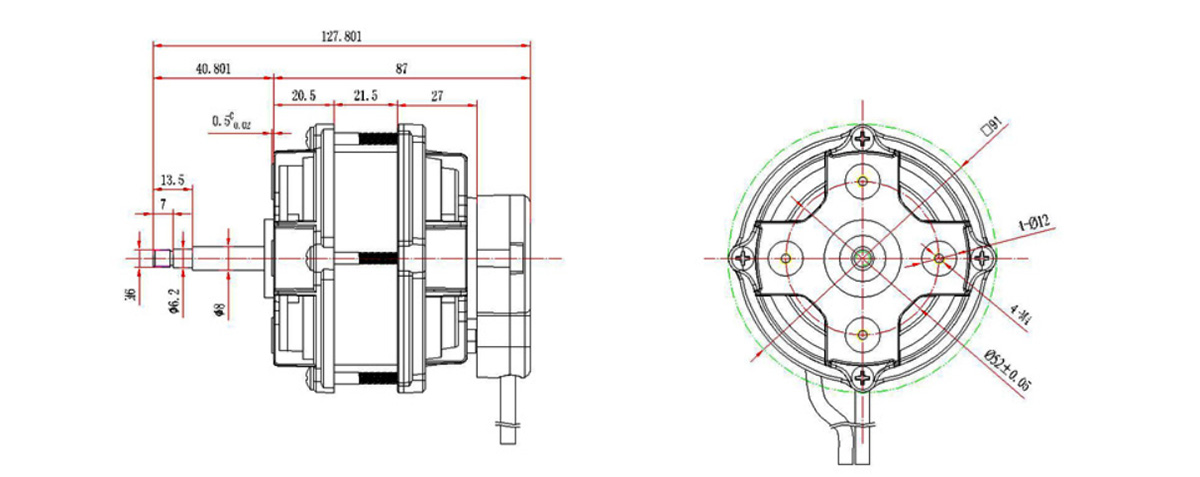
Kichen Kach Kachroboter Kachmaschinn geschalt Oflehnung Motor
Motor Parameteren
| Betribssystemer Volt | DC 300V |
| Bewäert aktuell | 2,8±10%A |
| Maximum Stroum | 5, 4A |
| Startspannung | DC 23V ~ 25V |
| bewäert Kraaft | 700±10%W |
| Bewäert Geschwindegkeet | 35000 ± 10% U/min |
| Idle Muecht | <100 Watt |
| Zuel vu Pole | 2 |
| Dréimoment | 0,2 NM |
| Efficacitéit | 80%±10% |
| Kommutatioun | Axial CW |
| Kaméidi | 96dB MAX, <30cm |
| Gewiicht | 1,68 kg |
| lager | 2 Kugellager |
| kontrolléieren | Hall Sensor |
| Installéieren | flange Mount |
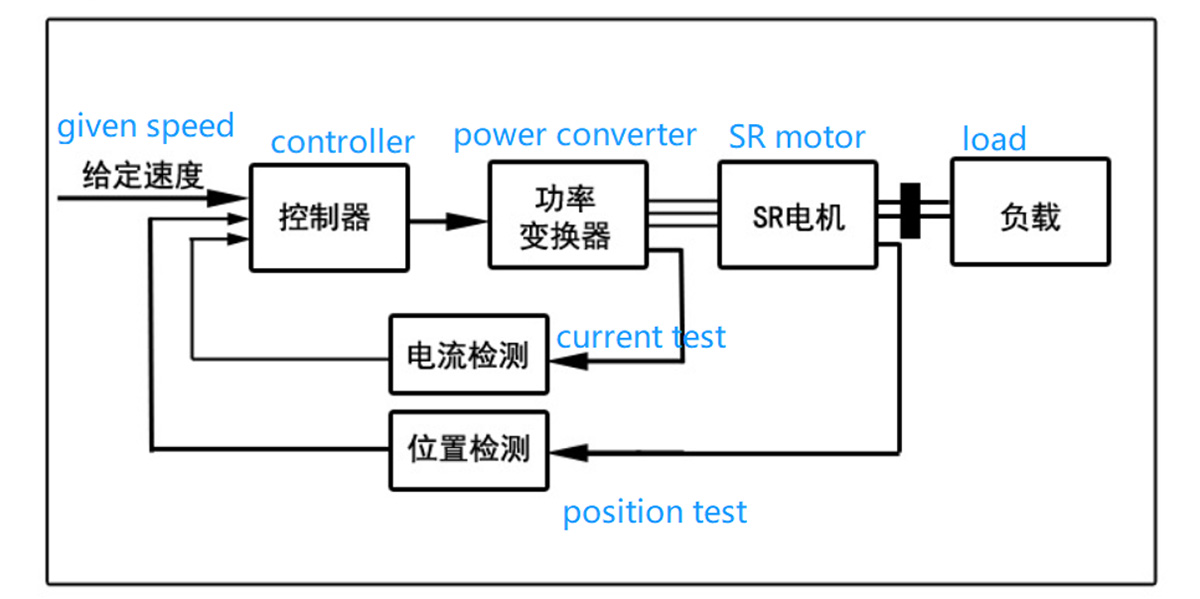
Motor Struktur
1. D'Zesummesetzung vun der geschalt Reluctance Motor Drive System
Switched Reluctance Motor Drive System (SRD) besteet haaptsächlech aus geschalten Reluctance Motor, Power Converter, Controller an Detektor.
2.Gewiesselt Reluktanzmotor
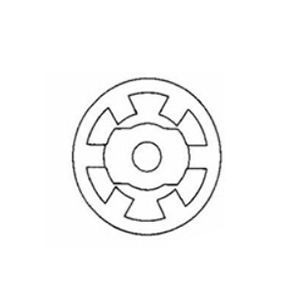
SR Motore kënnen an eenzel-Phase, zwee-Phas, dräi-Phase, véier-Phase a Multi-Phas Strukture mat verschiddene Phase Zuelen entworf ginn, an et sinn Single-Zänn Struktur pro Pole a Multi-Zänn Struktur pro Pol, axial Loft Spalt, Radial Loft Spalt an axial Loft Spalt. A radial Hybrid Loft Spalt Struktur, banneschten Rotor a baussenzege Rotor Struktur, SR Motore ënnert dräi-Phase allgemeng net Self-ugefaangen Fähegkeet. Eng grouss Zuel vu Phasen ass avantagéis fir Dréimomentschwankungen ze reduzéieren, awer et féiert zu enger komplexer Struktur, vill Haaptschaltgeräter a erhéicht Käschten. Am Moment sinn déi zwee-Phase 6 / 4-Pol Struktur an déi véier-Phase 8 / 6-Niveau Struktur vill benotzt.
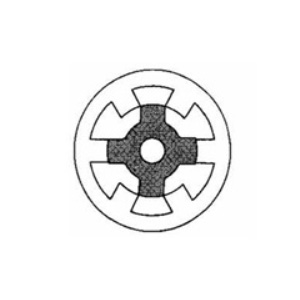
Regelméisseg Struktur 3-Phase
6/4 Polar SR Motor
3-Phase 6/2
Polar SR Motor
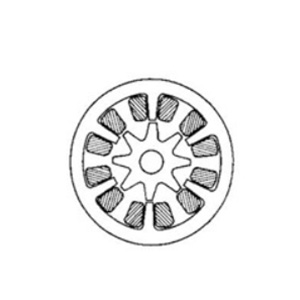
3-Phase 6/8
Polar SR Motor

3-Phase 12/8
Polar SR Motor
3. Physikalesch wiring Diagramm vun Motor a Chauffeur
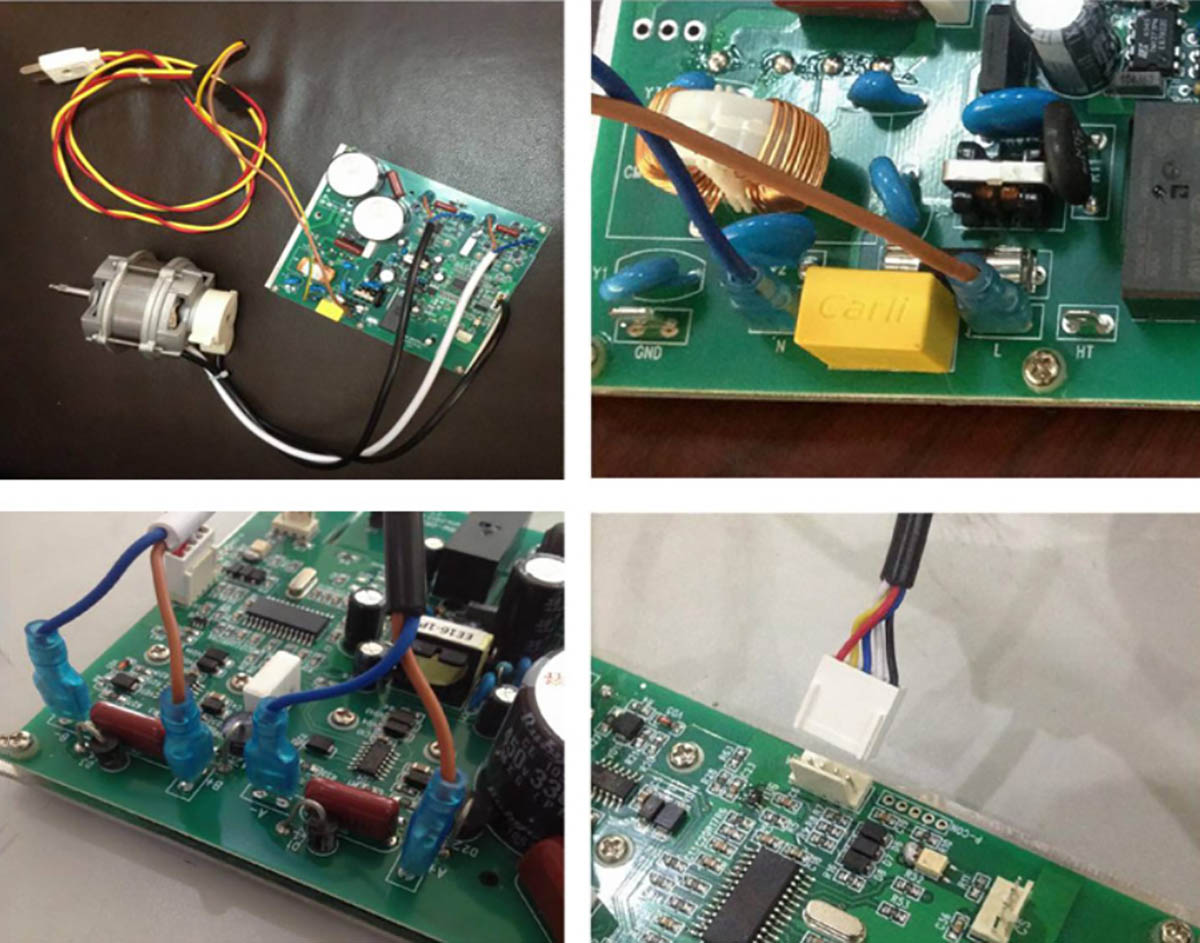
Produit Foto


Motor Phase wiring
Schwaarz (Braun /A+ Blo /A-), Wäiss (Braun /A+ Blo /A-), Drotlängt L=380 ± 50mm
Hall Drot wiring:
Rout (+5V), schwaarz (GND), giel (SA), blo (SB), wäiss (SC), Linn Längt L= Linn Längt L=380 ± 50mm
Lagerung: 5 ℃ ~ 40 ℃, Fiichtegkeet <90%
Isolatiounsklass: F
Rëssfräi Spule dréit sech fir 3 Minutten bei 130% vun der nomineller Spannung.
Aarbechtsliewen: 2000 Stonnen ënner normalen Aarbechtsbedingunge.
D'axial Verschiebung soll manner wéi 0.02mm sinn wann de Motor leeft.
Motor Charakteristiken
1.Héich Systemeffizienz: A sengem breet Geschwindegkeetsreguléierungsberäich ass d'Gesamteffizienz op d'mannst 10% méi héich wéi aner Geschwindegkeetsreguléierungssystemer, an déi héich Effizienz ass méi offensichtlech bei niddreger Geschwindegkeet an net-bewäertte Last.
2.Breet Spektrum vu Geschwindegkeetsreguléierung, laangfristeg Operatioun mat gerénger Geschwindegkeet: Et kann ënner Laascht fir eng laang Zäit am Beräich vun Null bis maximal Geschwindegkeet lafen, an d'Temperatursteigerung vum Motor a Controller ass manner wéi déi vun der bewäertter Laascht.
3.Héich Startmoment, niddereg Startstroum: Wann de Startmoment 150% vum bewäerten Dréimoment erreecht, ass den Startstroum nëmmen 30% vum bewäerten Stroum.
4. Et kann dacks ufänken an ophalen, a wiesselen tëscht no vir an ëmgedréint Rotatioun: et kann dacks ufänken an ophalen, a schalt tëscht no vir an ëmgedréint Rotatioun dacks. Wann et eng Brems-Eenheet gëtt an d'Bremskraaft dem Zäitbedarf entsprécht, kann de Start-Stop- a Forward-Reverse-Schalter méi wéi 1.000 Mol pro Stonn erreechen.
5. Staark Iwwerlaaschtkapazitéit: wann d'Laascht vill méi grouss ass wéi d'bewäertte Laascht fir eng kuerz Zäit, fällt d'Geschwindegkeet erof, d'maximal Ausgangskraaft gëtt behalen, an et gëtt keen Iwwerstroum-Phänomen. Wann d'Laascht op normal zréckkënnt, geet d'Geschwindegkeet zréck op déi agestallte Geschwindegkeet.
6.Mechanesch Kraaft an Zouverlässegkeet si méi héich wéi aner Zorte vu Motoren. De Rotor huet keng permanent Magnete a kann eng méi héich zulässlech Temperaturerhéijung hunn.
Applikatioun
Fan a Kachmaschinn
Produit Kategorien
-

10kw 96V AC Motor a Controller Assemblée fir g ...
-

Gewiesselte Reluktanzmotor benotzt an neier Energieko ...
-

10kw 72v AC Motor Elektresch Auto Bus Konversioun K ...
-

1.2k 32V AC elektresch Synchronmotor Deeler fir ...
-
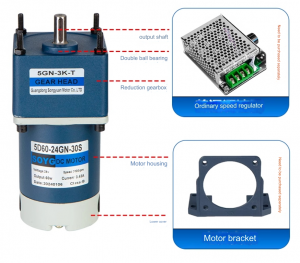
5D60-24GU-30S 12v24v DC Reduktioun Motor
-

1.2k 32V AC elektresch Synchronmotor Deeler fir ...