- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu

PX 시리즈 소형 전류 기어드 모터
개요
J-SZ(ZYT)-PX 시리즈 소형 DC 기어드 모터는 각각 SZ(ZYT) 시리즈 DC 모터와 PX 유형 일반 정밀 유성 감속기로 구성되며 무단 속도 조절이 가능한 전원 공급 장치를 갖추고 있습니다. 넓은 조정 범위, 소형, 경량, 고효율, 컴팩트한 구조, 큰 출력 토크, 저속, 고토크 및 무단 속도 조절이 필요한 드라이브에 널리 사용됩니다. 무한 가변 속도.
PX 시리즈 유성 기어 감속기는 AC 모터, 스테퍼 모터 및 기타 모터에 직접 연결할 수 있습니다.
PX 시리즈는 웜기어 감속기 및 사이클로이드 바람개비 감속기에 직접 연결하여 속도 비율이 다르거나 속도 비율이 큰 감속기를 형성할 수도 있습니다.
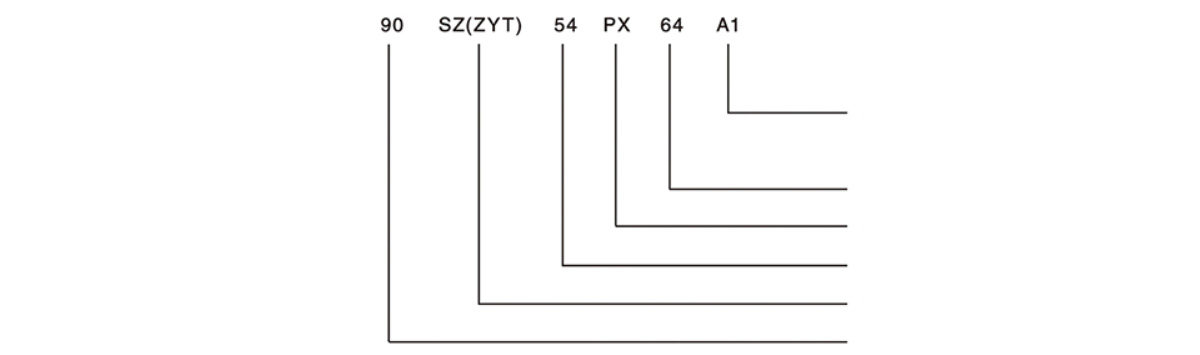
감속기 모델 지침
모터 모델
A1- 설치 형태: A1은 발 설치, A3은 플랜지 설치, B5는 원형 플랜지 설치입니다.
64 -감소율: 1:64
PX - 일반 정밀 유성 감속기
54 - 모터 성능 매개변수 코드
SZ(ZYT ) - DC 서보 모터(영구자석 DC 모터)
90 - 모터 베이스 번호: 외경 90mm를 나타냅니다.
감속기 모델
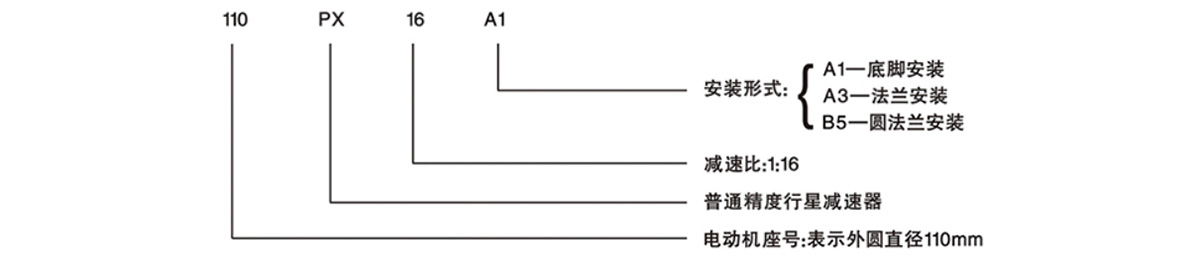
A1- 설치 형태: A1은 발 설치, A3은 플랜지 설치, B5는 원형 플랜지 설치입니다.
16 - 축소 비율: 1:64
PX - 일반 정밀 유성 감속기
110 - 모터 베이스 번호: 외경 90mm를 나타냅니다.
전기 모터의 기술 데이터
| 속도(r/분) | 토크(mN·m) | 모델 | 힘 | 정격속도(r/min) | 설치하다 | 정격전압 | 비율을 감소시키십시오 | 비고 | |
| 750 | 260 | 55ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187.5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660년 | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187.5 | 1270 | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187.5 | 1780년 | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
PS 시리즈 일반 속도비
레벨 1: 4, 6
보조: 16, 24, 36
레벨 3: 64 , 96 , 144 , 216
레벨 4: 2563845768641296
90PX 시리즈 비표준 속도비
레벨 1: 3
레벨 2: 9 , 12 , 18
레벨 3: 27 , 48 , 54 , 72 , 108
4층: 81 , 162 , 192 , 288 , 324 , 432 , 648
110PX 시리즈 비표준 속도 비율
레벨 1: 5
레벨 2: 20 , 25 , 30
레벨 3: 80 , 100 , 120 , 125 , 150 , 180
레벨 4: 320, 400, 480, 500, 600, 625, 720, 750, 900, 1080
특수한 속도 비율, 속도, 설치 크기 등과 같은 비표준 감속기를 설계할 수 있습니다.
선정예
사용자는 다음 내용을 참고하여 실제 작업 시스템과 부하의 성질에 따라 감속기의 출력과 모델을 정확하게 선택할 수 있습니다.
1.감속기의 부하 토크와 출력 속도에 따라 필요한 동력은 다음 공식으로 계산할 수 있습니다. P=T n/kh
공식에서: P- 출력 전력 WT - 부하 토크 Nm, 기술 데이터 시트에 따라 n- 출력 속도 r/min 선택
K-부하 상수 9560 eta - 전송 효율, 다음 표에서 선택됨
전송 비율
| 변속비(i) | 4(6) | 16(36) | 64(216) | 256(1296) |
| η | 0.76 | 0.72 | 0.68 | 0.65 |
2.모터 거버너는 O에서 정격 속도까지 감속기의 무단계 속도 변경을 실현하도록 선택할 수 있습니다.
3. 실제 작업 시스템 및 부하 특성에 따라 서비스 계수표를 참조하여 서비스 계수를 선택할 수 있습니다. 계산 후 감속기의 요구 동력을 결정할 수 있으며, 필요한 출력 속도에 따라 기술 데이터 표를 참조하여 감속기 모델을 선택할 수 있습니다.
작업 색인 시트
| 일일 근무 시간 | 부하 수준 | |||
| 평균 안정 | 중간 정도의 활기 | 큰 영향 | ||
| 12 | 1 | 1.25 | 1.75 | |
| 24 | 1.25 | 1.50 | 2 | |
예를 들어 부하가 균일하고 안정적인 경우 필요한 모터 정격 전력은 40W, 정격 전압은 110V, 출력 속도 비율은 4, 일일 작업 시간은 12시간인 경우 40W가 선택됩니다. 부하의 특성이 중간 정도의 진동인 경우:
그런 다음: 서비스 시리즈를 1.25 로 선택하려면 서비스 계수표를 참조하십시오. 필요전력 W=40W*1.25=50W
비. 옵션 J70SZ54P*4에 대한 기술 데이터 시트를 확인하세요.
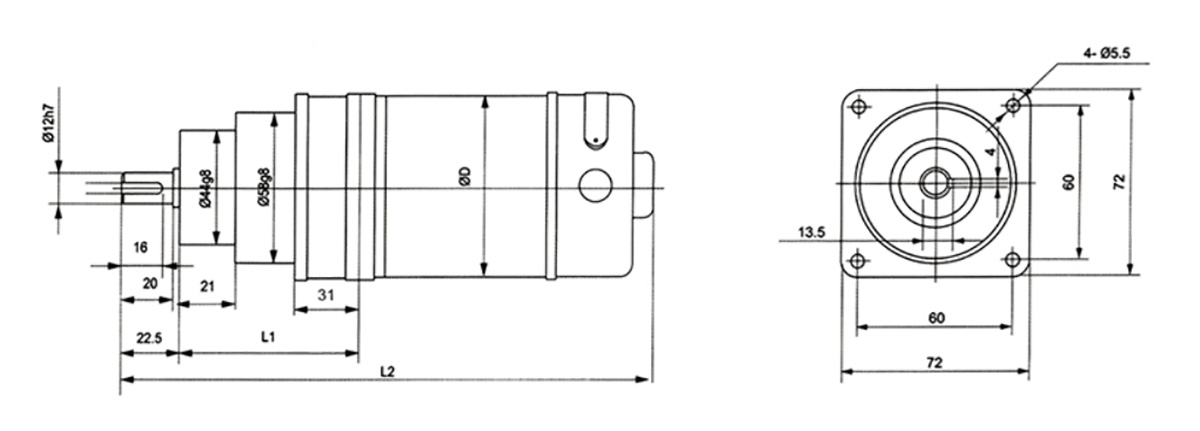
70PX 전면 플랜지
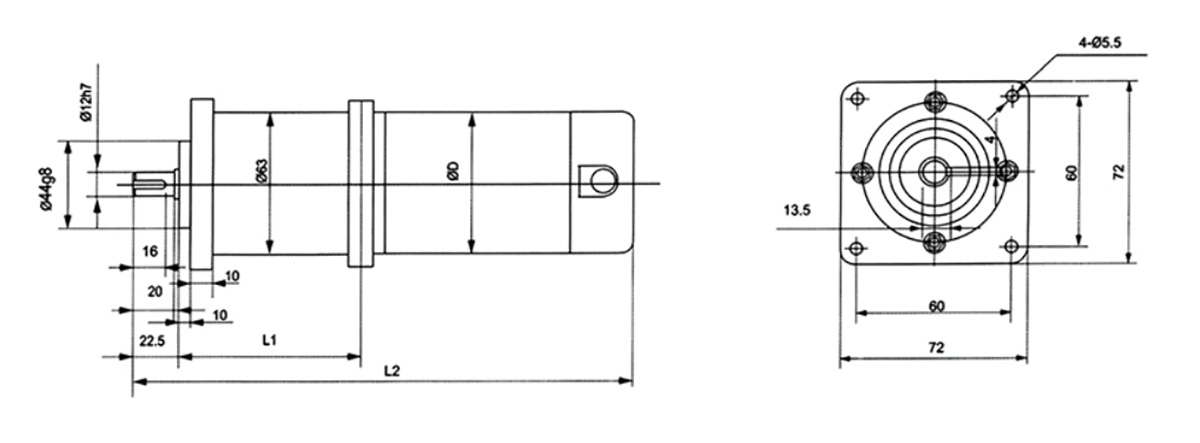
70PX 후면 플랜지