ចងចាំគោលការណ៍ម៉ូទ័រ និងរូបមន្តសំខាន់ៗមួយចំនួន ហើយស្វែងយល់អំពីម៉ូទ័រងាយស្រួល!
ម៉ូទ័រដែលជាទូទៅគេហៅថាម៉ូទ័រអេឡិចត្រិច ត្រូវបានគេស្គាល់ថាជាម៉ូទ័រគឺជារឿងធម្មតាបំផុតនៅក្នុងឧស្សាហកម្មទំនើប និងជីវិត ហើយក៏ជាឧបករណ៍ដ៏សំខាន់បំផុតសម្រាប់បំប្លែងថាមពលអគ្គិសនីទៅជាថាមពលមេកានិចផងដែរ។ម៉ូទ័រត្រូវបានដំឡើងនៅក្នុងរថយន្ត រថភ្លើងល្បឿនលឿន យន្តហោះ ទួរប៊ីនខ្យល់ មនុស្សយន្ត ទ្វារស្វ័យប្រវត្តិ ម៉ាស៊ីនបូមទឹក ថាសរឹង និងសូម្បីតែទូរសព្ទដៃធម្មតាបំផុតរបស់យើង។ មនុស្សជាច្រើនដែលទើបនឹងរៀនម៉ូតូ ឬទើបតែរៀនជំនាញបើកបរម៉ូតូ ប្រហែលជាមានអារម្មណ៍ថា ចំណេះដឹងខាងម៉ូតូពិបាកយល់ ហើយថែមទាំងឃើញវគ្គដែលពាក់ព័ន្ធ ហើយគេហៅថា "អ្នកសម្លាប់ឥណទាន"។ការចែករំលែកដែលខ្ចាត់ខ្ចាយខាងក្រោមអាចឱ្យអ្នកថ្មីថ្មោងយល់បានយ៉ាងឆាប់រហ័សអំពីគោលការណ៍នៃម៉ូទ័រអសមកាល AC ។ គោលការណ៍នៃម៉ូទ័រ៖ គោលការណ៍នៃម៉ូទ័រគឺសាមញ្ញណាស់។ និយាយឱ្យសាមញ្ញ វាគឺជាឧបករណ៍ដែលប្រើថាមពលអគ្គិសនីដើម្បីបង្កើតវាលម៉ាញេទិកបង្វិលនៅលើឧបករណ៏ ហើយរុញ rotor ឱ្យបង្វិល។នរណាម្នាក់ដែលបានសិក្សាពីច្បាប់នៃការបញ្ចូលអេឡិចត្រូម៉ាញ៉េទិចដឹងថា ឧបករណ៏ដែលមានថាមពលនឹងត្រូវបានបង្ខំឱ្យបង្វិលក្នុងដែនម៉ាញេទិក។ នេះគឺជាគោលការណ៍ជាមូលដ្ឋាននៃម៉ូទ័រ។ នេះជាចំណេះដឹងរូបវិទ្យាវិទ្យាល័យ។ រចនាសម្ព័នរបស់ម៉ូទ័រ៖ អ្នកណាម្នាក់ដែលបានរុះរើម៉ូទ័រដឹងថាម៉ូទ័រមានពីរផ្នែក គឺផ្នែក stator ថេរ និងផ្នែកបង្វិល rotor ដូចខាងក្រោម៖ 1. Stator (ផ្នែកឋិតិវន្ត) ស្នូល stator: ជាផ្នែកមួយដ៏សំខាន់នៃសៀគ្វីម៉ាញេទិកនៃម៉ូទ័រដែល stator windings ត្រូវបានដាក់; stator winding: វាគឺជាឧបករណ៏ដែលជាផ្នែកសៀគ្វីនៃម៉ូទ័រដែលត្រូវបានភ្ជាប់ទៅនឹងការផ្គត់ផ្គង់ថាមពលនិងប្រើដើម្បីបង្កើតវាលម៉ាញេទិកបង្វិល; មូលដ្ឋានម៉ាស៊ីន៖ ជួសជុលស្នូល stator និងគម្របចុងម៉ូទ័រ ហើយដើរតួរជាការការពារ និងការសាយភាយកំដៅ។ ស្នូល rotor: ជាផ្នែកមួយដ៏សំខាន់នៃសៀគ្វីម៉ាញេទិកនៃម៉ូទ័រ, rotor winding ត្រូវបានដាក់នៅក្នុងរន្ធដោតស្នូល; Rotor winding: កាត់ដែនម៉ាញេទិចបង្វិលរបស់ stator ដើម្បីបង្កើតកម្លាំងអេឡិចត្រូម៉ូទ័រ និងចរន្ត និងបង្កើតកម្លាំងបង្វិលអេឡិចត្រូម៉ាញ៉េទិចដើម្បីបង្វិលម៉ូទ័រ។ 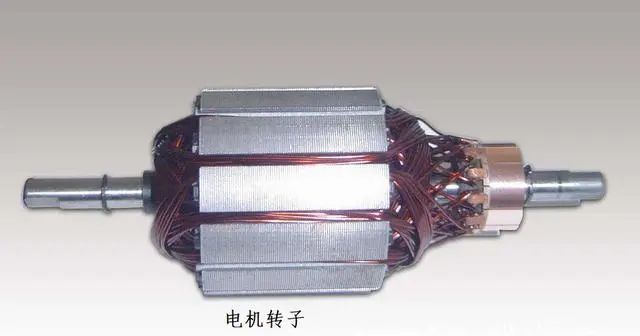
រូបមន្តគណនាជាច្រើននៃម៉ូទ័រ៖ 1. ទាក់ទងនឹងអេឡិចត្រូម៉ាញ៉េទិច 1) រូបមន្តកម្លាំងអេឡិចត្រូម៉ូទ័រនៃម៉ូទ័រ: E = 4.44 * f * N * Φ, E គឺជាកម្លាំងអេឡិចត្រូម៉ូទ័រ, f គឺជាប្រេកង់, S គឺជាផ្នែកឆ្លងកាត់នៃចំហាយជុំវិញ (ដូចជាដែក។ ស្នូល) N គឺជាចំនួនវេន ហើយ Φ គឺជាដែនម៉ាញ៉េទិច។ តើរូបមន្តត្រូវបានចេញដោយរបៀបណា យើងនឹងមិនស្វែងយល់អំពីរឿងទាំងនេះទេ យើងនឹងមើលជាចម្បងអំពីរបៀបប្រើវា។កម្លាំងអេឡិចត្រុងដែលជំរុញគឺជាខ្លឹមសារនៃអាំងឌុចស្យុងអេឡិចត្រូម៉ាញេទិក។ បនា្ទាប់ពីបនា្ទាប់ពីចំហាយដ្រលមានកម្លាំងអេឡិចត្រុងដ្រលបណា្តាលត្រូវបានបិទនោះ ចរន្តឆ្លាស់នឹងត្រូវបានបង្កើត។ចរន្តដែលបង្កើតត្រូវបានទទួលរងនូវកម្លាំងអំពែរនៅក្នុងវាលម៉ាញេទិក បង្កើតជាពេលម៉ាញេទិកដែលរុញច្រានរបុំវិល។ វាត្រូវបានគេស្គាល់ពីរូបមន្តខាងលើថាទំហំនៃកម្លាំងអេឡិចត្រូម៉ាញេទិកគឺសមាមាត្រទៅនឹងប្រេកង់នៃការផ្គត់ផ្គង់ថាមពលចំនួនវេននៃឧបករណ៏និងលំហូរម៉ាញ៉េទិច។ រូបមន្តគណនាលំហូរម៉ាញេទិក Φ=B*S*COSθ នៅពេលដែលយន្តហោះដែលមានផ្ទៃ S កាត់កែងទៅនឹងទិសដៅនៃដែនម៉ាញេទិក មុំ θ គឺ 0, COSθ ស្មើនឹង 1 ហើយរូបមន្តក្លាយជា Φ=B*S . 
រួមបញ្ចូលគ្នានូវរូបមន្តទាំងពីរខាងលើ អ្នកអាចទទួលបានរូបមន្តសម្រាប់គណនាអាំងតង់ស៊ីតេលំហូរម៉ាញ៉េទិចរបស់ម៉ូទ័រ៖ B=E/(4.44*f*N*S)។ 2) មួយទៀតគឺរូបមន្តកម្លាំងអំពែរ។ ដើម្បីដឹងពីកម្លាំងប៉ុន្មានដែលរបុំត្រូវបានទទួល យើងត្រូវការរូបមន្តនេះ F=I*L*B*sinα ដែលខ្ញុំជាកម្លាំងបច្ចុប្បន្ន L ជាប្រវែង conductor B ជាកម្លាំងដែនម៉ាញេទិក α ជាមុំរវាង ទិសដៅនៃចរន្តនិងទិសដៅនៃដែនម៉ាញេទិក។នៅពេលដែលលួសកាត់កែងទៅនឹងដែនម៉ាញេទិក រូបមន្តក្លាយជា F=I*L*B (ប្រសិនបើវាជា N-turn coil លំហូរម៉ាញេទិក B គឺជាលំហូរម៉ាញេទិកសរុបនៃ N-turn coil ហើយមិនមាន ត្រូវការគុណ N) ។ ប្រសិនបើអ្នកដឹងពីកម្លាំង អ្នកនឹងដឹងពីកម្លាំងបង្វិលជុំ។ កម្លាំងបង្វិលជុំស្មើនឹងកម្លាំងបង្វិលជុំគុណនឹងកាំនៃសកម្មភាព T=r*F=r*I*B*L (ផលិតផលវ៉ិចទ័រ)។តាមរយៈរូបមន្តពីរនៃថាមពល = កម្លាំង * ល្បឿន (P = F * V) និងល្បឿនលីនេអ៊ែរ V = 2πR * ល្បឿនក្នុងមួយវិនាទី (n វិនាទី) ទំនាក់ទំនងជាមួយថាមពលអាចត្រូវបានបង្កើតឡើងហើយរូបមន្តនៃលេខ 3 ខាងក្រោមអាច ទទួលបាន។ទោះជាយ៉ាងណាក៏ដោយគួរកត់សំគាល់ថាកម្លាំងបង្វិលជុំទិន្នផលពិតប្រាកដត្រូវបានប្រើនៅពេលនេះដូច្នេះថាមពលដែលបានគណនាគឺជាថាមពលទិន្នផល។ 2. រូបមន្តគណនាល្បឿននៃម៉ូទ័រអសមកាល AC: n=60f/P នេះគឺសាមញ្ញណាស់ ល្បឿនគឺសមាមាត្រទៅនឹងប្រេកង់នៃការផ្គត់ផ្គង់ថាមពល ហើយសមាមាត្រច្រាសទៅនឹងចំនួនគូបង្គោល (ចងចាំមួយគូ ) នៃម៉ូទ័រគ្រាន់តែអនុវត្តរូបមន្តដោយផ្ទាល់។ទោះជាយ៉ាងណាក៏ដោយ រូបមន្តនេះពិតជាគណនាល្បឿនធ្វើសមកាលកម្ម (ល្បឿនវាលម៉ាញេទិកបង្វិល) ហើយល្បឿនពិតនៃម៉ូទ័រអសមកាលនឹងទាបជាងល្បឿនធ្វើសមកាលកម្មបន្តិច ដូច្នេះយើងឃើញជាញឹកញាប់ថាម៉ូទ័រ 4-pole ជាទូទៅមានច្រើនជាង 1400 rpm ។ ប៉ុន្តែតិចជាង 1500 rpm ។ 3. ទំនាក់ទំនងរវាងកម្លាំងបង្វិលម៉ូទ័រ និងល្បឿនម៉ែត្រថាមពល៖ T=9550P/n (P គឺជាថាមពលម៉ូទ័រ n ជាល្បឿនម៉ូទ័រ) ដែលអាចកាត់ចេញពីខ្លឹមសារនៃលេខ 1 ខាងលើ ប៉ុន្តែយើងមិនចាំបាច់រៀន ដើម្បីគណនា ចងចាំការគណនានេះ រូបមន្តមួយនឹងធ្វើ។ប៉ុន្តែសូមរំលឹកម្តងទៀតថា ថាមពល P នៅក្នុងរូបមន្តមិនមែនជាថាមពលបញ្ចូលទេ ប៉ុន្តែជាថាមពលទិន្នផល។ ដោយសារតែការបាត់បង់ម៉ូទ័រថាមពលបញ្ចូលមិនស្មើនឹងថាមពលទិន្នផល។ប៉ុន្តែសៀវភៅច្រើនតែត្រូវបានគេកំណត់ជាឧត្តមគតិ ហើយថាមពលបញ្ចូលគឺស្មើនឹងថាមពលទិន្នផល។ 
4. ថាមពលម៉ូទ័រ (ថាមពលបញ្ចូល): 1) រូបមន្តគណនាថាមពលម៉ូទ័រតែមួយដំណាក់កាល៖ P=U*I*cosφ ប្រសិនបើកត្តាថាមពលគឺ 0.8 វ៉ុលគឺ 220V ហើយចរន្តគឺ 2A បន្ទាប់មកថាមពល P=0.22×2×0.8=0.352KW ។ 2) រូបមន្តគណនាថាមពលម៉ូទ័របីដំណាក់កាល៖ P=1.732*U*I*cosφ (cosφ ជាកត្តាថាមពល U ជាវ៉ុលខ្សែបន្ទុក ហើយខ្ញុំជាចរន្តខ្សែបន្ទុក)។ទោះជាយ៉ាងណាក៏ដោយ U និង I នៃប្រភេទនេះគឺទាក់ទងទៅនឹងការតភ្ជាប់នៃម៉ូទ័រ។ នៅក្នុងការតភ្ជាប់ផ្កាយ ចាប់តាំងពីចុងធម្មតានៃរបុំបីដែលបំបែកដោយវ៉ុល 120° ត្រូវបានភ្ជាប់ជាមួយគ្នាដើម្បីបង្កើតជាចំណុច 0 នោះវ៉ុលដែលផ្ទុកនៅលើឧបករណ៏ផ្ទុកគឺពិតជាដំណាក់កាលមួយទៅដំណាក់កាល។ នៅពេលដែលវិធីសាស្រ្តតភ្ជាប់ដីសណ្តរត្រូវបានប្រើ ខ្សែថាមពលមួយត្រូវបានភ្ជាប់ទៅចុងនីមួយៗនៃឧបករណ៏នីមួយៗ ដូច្នេះវ៉ុលនៅលើឧបករណ៏ផ្ទុកគឺជាវ៉ុលបន្ទាត់។ប្រសិនបើវ៉ុល 380V ដែលប្រើជាទូទៅ 3 ដំណាក់កាល ឧបករណ៏គឺ 220V នៅក្នុងការតភ្ជាប់ផ្កាយ ហើយដីសណ្តគឺ 380V, P=U*I=U^2/R ដូច្នេះថាមពលនៅក្នុងការតភ្ជាប់ដីសណ្តគឺការតភ្ជាប់ផ្កាយ 3 ដង។ នោះហើយជាមូលហេតុដែលម៉ូទ័រថាមពលខ្ពស់ប្រើ star-delta step-down ដើម្បីចាប់ផ្តើម។ បន្ទាប់ពីធ្វើជាម្ចាស់លើរូបមន្តខាងលើ និងយល់ឱ្យបានច្បាស់ គោលការណ៍នៃម៉ូទ័រនឹងមិនមានការភ័ន្តច្រឡំទេ ហើយក៏មិនខ្លាចក្នុងការរៀនវគ្គខ្ពស់នៃការបើកបរម៉ូតូដែរ។ 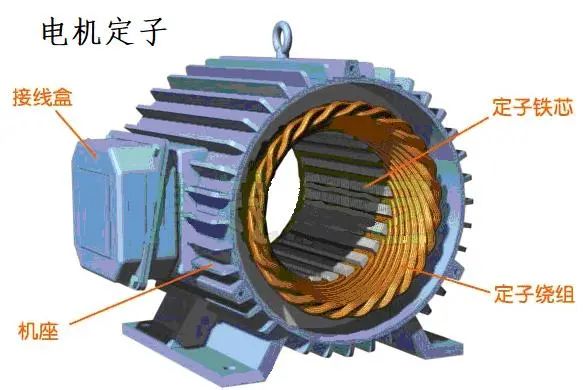
1) កង្ហារ: ជាទូទៅត្រូវបានដំឡើងនៅកន្ទុយនៃម៉ូទ័រដើម្បីរំសាយកំដៅទៅម៉ូទ័រ។ 2) ប្រអប់ប្រសព្វ៖ ប្រើសម្រាប់ភ្ជាប់ទៅការផ្គត់ផ្គង់ថាមពល ដូចជាម៉ូទ័រអសមកាល AC បីដំណាក់កាល វាក៏អាចភ្ជាប់ទៅផ្កាយ ឬដីសណ្តបានតាមតម្រូវការ។ 3) Bearing: ភ្ជាប់ផ្នែកបង្វិលនិងស្ថានីនៃម៉ូទ័រ; 4. គម្របចុង៖ គម្របខាងមុខ និងខាងក្រោយនៅខាងក្រៅម៉ូទ័រដើរតួនាទីជំនួយ។
ពេលវេលាផ្សាយ៖ ថ្ងៃទី ១៣ មិថុនា ២០២២ top