モーターの原理といくつかの重要な公式を覚えて、モーターをとても簡単に理解してください。
一般に電気モーターとも呼ばれるモーターは、現代の産業や生活の中で非常に一般的であり、電気エネルギーを機械エネルギーに変換するための最も重要な機器でもあります。モーターは、自動車、高速列車、飛行機、風力タービン、ロボット、自動ドア、給水ポンプ、ハードドライブ、さらには最も一般的な携帯電話にも搭載されています。 モーターに初めて触れる人や、モーター駆動の知識を学んだばかりの人は、モーターの知識を理解しにくいと感じ、該当する講座を見ても「クレジットキラー」と呼ばれる人も多いでしょう。以下の分散共有により、初心者でも AC 非同期モーターの原理をすぐに理解できます。 モーターの原理: モーターの原理は非常に単純です。簡単に言うと、電気エネルギーを利用してコイルに回転磁界を発生させ、ローターを押して回転させる装置です。電磁誘導の法則を勉強したことのある人なら、通電されたコイルが磁界中で回転することを知っています。これがモーターの基本原理です。中学物理の知識です。 モーターの構造: モーターを分解したことのある人は、モーターが主に次の 2 つの部分、固定ステーター部分と回転ローター部分で構成されていることを知っています。 ステータコア: モータの磁気回路の重要な部分であり、その上にステータ巻線が配置されます。 固定子巻線: モーターの回路部分であるコイルであり、電源に接続され、回転磁界を生成するために使用されます。 マシンベース: ステーターコアとモーターエンドカバーを固定し、保護と放熱の役割を果たします。 ローターコア: モーターの磁気回路の重要な部分であり、ローター巻線はコアスロットに配置されます。 回転子巻線:固定子の回転磁界を遮断して誘導起電力と電流を発生させ、電磁トルクを形成してモーターを回転させます。 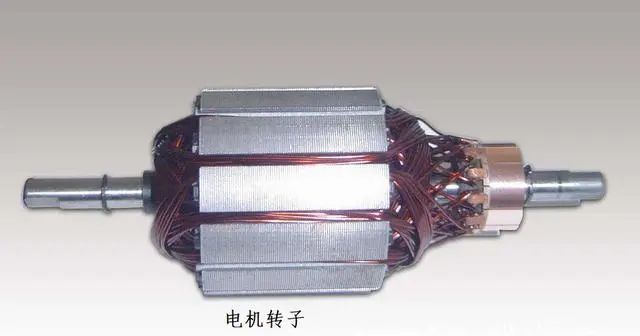
1) モーターの誘導起電力式:E=4.44*f*N*Φ、Eはコイル起電力、fは周波数、Sは周囲の導体(鉄など)の断面積コア)、N は巻き数、Φ は磁気パスです。 式がどのように導出されるかについては掘り下げず、主にその使用方法について説明します。誘導起電力が電磁誘導の本質です。誘導起電力のある導体が閉じられると、誘導電流が発生します。誘導電流は磁界内のアンペア力を受け、コイルを回転させる磁気モーメントを生成します。 上式より、起電力の大きさは電源の周波数、コイルの巻き数、磁束に比例することが分かります。 磁束の計算式Φ=B*S*COSθは、面積Sの面が磁場の方向に垂直なとき、角度θが0、COSθ=1となり、式はΦ=B*Sとなります。 。 
上記 2 つの式を組み合わせると、モーターの磁束強度の計算式、B=E/(4.44*f*N*S) が得られます。 2) もう 1 つはアンペア力の公式です。コイルが受けている力の大きさを知るには、次の公式 F=I*L*B*sinα が必要です。ここで、I は電流の強さ、L は導体の長さ、B は磁場の強さ、α は導体の間の角度です。電流の方向と磁場の方向。ワイヤが磁場に対して垂直の場合、式は F=I*L*B になります (N ターン コイルの場合、磁束 B は N ターン コイルの総磁束であり、磁束 B はありません)。 N を掛ける必要があります)。 力がわかればトルクもわかります。トルクは、トルクに作用半径を乗じた値、T=r*F=r*I*B*L (ベクトル積) に等しくなります。力=力×速度(P=F×V)と線速度V=2πR×1秒あたりの速度(n秒)の2つの式により、力との関係が成り立ち、下記3番の式が得られます。が得られる。ただし、このときは実際の出力トルクを使用するため、計算上のパワーが出力パワーとなることに注意してください。 2. AC 非同期モーターの速度の計算式: n=60f/P、これは非常に簡単です。速度は電源の周波数に比例し、極ペアの数に反比例します (ペアを覚えておいてください)。 )モーターの式を直接適用するだけです。ただし、この計算式は実際には同期速度(回転磁界の速度)を計算するものであり、非同期モータの実際の速度は同期速度よりも若干遅くなりますので、一般的に4極モータでは1400rpmを超える場合が多いのですが、ただし1500rpm未満。 3. モータートルクとパワーメーター速度の関係:T=9550P/n (P はモーター出力、n はモーター速度) 上記 No.1 の内容から推測できますが、学習する必要はありません。推測するには、この計算を覚えておいてください。公式で十分です。ただし、式の電力 P は入力電力ではなく、出力電力であることをもう一度思い出してください。モーターの損失により、入力電力は出力電力と等しくなりません。しかし、本は理想化されていることが多く、入力パワーと出力パワーは同じです。 
1) 単相モータ電力計算式 P=U*I*cosφ 力率 0.8、電圧 220V、電流 2A の場合、電力 P=0.22×2×0.8=0.352KW となります。 2) 三相モータ電力計算式:P=1.732*U*I*cosφ(cosφは力率、Uは負荷線電圧、Iは負荷線電流)。ただし、このタイプの U と I はモーターの接続に関係します。スター結線では、120°の電圧で分離された 3 つのコイルの共通端が互いに接続されて 0 点を形成するため、負荷コイルにかかる電圧は実際には相間になります。デルタ結線方式の場合、各コイルの両端に電源線が接続されるため、負荷コイルの電圧が線間電圧となります。一般的に使われている三相380Vの電圧を使用すると、スター結線でコイルが220V、デルタ結線が380Vとなり、P=U*I=U^2/Rとなり、デルタ結線の電力はスター結線の3倍となり、これが、高出力モーターが始動にスターデルタ降圧を使用する理由です。 上記の公式をマスターして完全に理解すれば、モーターの原理を混乱することはなく、高度なモーター駆動のコースを学ぶことも恐れなくなります。 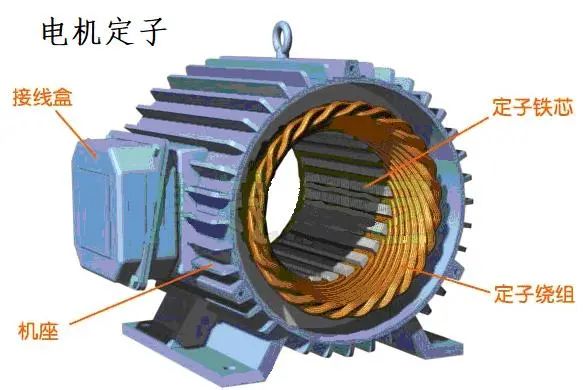
1) ファン: 通常、モーターの熱を放散するためにモーターの尾部に取り付けられます。 2)ジャンクションボックス:AC三相非同期モーターなどの電源に接続するために使用され、必要に応じてスターまたはデルタに接続することもできます。 3) ベアリング: モーターの回転部分と固定部分を接続します。 4. エンドカバー:モーターの外側にある前後のカバーはサポートの役割を果たします。
投稿日時: 2022 年 6 月 13 日 top