כלי רכב חשמליים מורכבים בעיקר משלושה חלקים: מערכת הנעה מנוע, מערכת סוללות ומערכת בקרת רכב. מערכת ההנעה המנועית היא החלק הממיר ישירות אנרגיה חשמלית לאנרגיה מכנית, הקובעת את מדדי הביצועים של כלי רכב חשמליים. לכן, בחירת מנוע ההנעה חשובה במיוחד.
גם בסביבת הגנת הסביבה, כלי רכב חשמליים הפכו בשנים האחרונות למוקד מחקר. כלי רכב חשמליים יכולים להשיג פליטות אפס או נמוכות מאוד בתנועה עירונית, ויש להם יתרונות עצומים בתחום הגנת הסביבה. כל המדינות עובדות קשה כדי לפתח רכבים חשמליים. כלי רכב חשמליים מורכבים בעיקר משלושה חלקים: מערכת הנעה מנוע, מערכת סוללות ומערכת בקרת רכב. מערכת ההנעה המנועית היא החלק הממיר ישירות אנרגיה חשמלית לאנרגיה מכנית, הקובעת את מדדי הביצועים של כלי רכב חשמליים. לכן, בחירת מנוע ההנעה חשובה במיוחד.
1. דרישות לכלי רכב חשמליים למנועי הנעה
נכון לעכשיו, הערכת ביצועי הרכב החשמלי מתייחסת בעיקר לשלושת מדדי הביצועים הבאים:
(1) קילומטראז' מרבי (ק"מ): הקילומטראז' המרבי של הרכב החשמלי לאחר טעינת המצבר במלואה;
(2) יכולת (ים) תאוצה: הזמן המינימלי הדרוש לרכב חשמלי להאיץ מעמידה למהירות מסוימת;
(3) מהירות מרבית (קמ"ש): המהירות המרבית אליה יכול רכב חשמלי להגיע.
למנועים המיועדים למאפייני הנהיגה של כלי רכב חשמליים יש דרישות ביצועים מיוחדות בהשוואה למנועים תעשייתיים:
(1) מנוע ההנעה של הרכב החשמלי דורש בדרך כלל דרישות ביצועים דינמיות גבוהות להתנעה/עצירה תכופה, האצה/האטה ובקרת מומנט;
(2) על מנת להפחית את המשקל של הרכב כולו, בדרך כלל מבוטלת תיבת ההילוכים מרובת הילוכים, מה שדורש שהמנוע יכול לספק מומנט גבוה יותר במהירות נמוכה או בעת טיפוס על מדרון, ובדרך כלל יכול לעמוד 4-5 פעמים עומס היתר;
(3) טווח ויסות המהירות נדרש להיות גדול ככל האפשר, ויחד עם זאת, יש צורך לשמור על יעילות תפעולית גבוהה בכל תחום ויסות המהירות;
(4) המנוע מתוכנן למהירות מדורגת גבוהה ככל האפשר, ובמקביל נעשה שימוש במעטפת מסגסוגת אלומיניום ככל האפשר. המנוע המהיר קטן בגודלו, מה שמסייע להפחתת משקלם של כלי רכב חשמליים;
(5) כלי רכב חשמליים צריכים להיות בעלי ניצול אנרגיה אופטימלי ולמלא תפקיד של שחזור אנרגיית בלימה. האנרגיה המוחזרת על ידי בלימה רגנרטיבית צריכה להגיע בדרך כלל ל-10%-20% מכלל האנרגיה;
(6) סביבת העבודה של המנוע המשמש בכלי רכב חשמליים מורכבת וקשוחה יותר, המחייבת את המנוע להיות בעל אמינות טובה והתאמה סביבתית, ובמקביל להבטיח שעלות ייצור המנוע לא תהיה גבוהה מדי.
2. מספר מנועי הנעה נפוצים
מנוע 2.1 DC
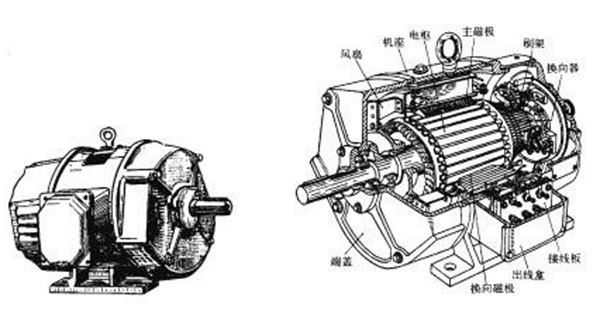
בשלב המוקדם של הפיתוח של כלי רכב חשמליים, רוב כלי הרכב החשמליים השתמשו במנועי DC כמנועי הנעה. סוג זה של טכנולוגיית מנוע בוגר יחסית, עם שיטות שליטה קלות וויסות מהירות מעולה. בעבר זה היה הנפוץ ביותר בתחום של מנועי ויסות מהירות. . עם זאת, בשל המבנה המכני המורכב של מנוע ה-DC, כגון: מברשות ומקומוטטורים מכניים, מוגבלות יכולת עומס היתר המיידית שלו והעלייה נוספת של מהירות המנוע, ובמקרה של עבודה ארוכת טווח, המבנה המכני של המנוע יהיה הפסד נוצר ועלויות התחזוקה גדלות. בנוסף, כאשר המנוע פועל, הניצוצות מהמברשות גורמים להתחממות הרוטור, לבזבז אנרגיה, מקשים על פיזור חום וגם גורמים להפרעות אלקטרומגנטיות בתדר גבוה, המשפיעות על ביצועי הרכב. בשל החסרונות הנ"ל של מנועי DC, כלי רכב חשמליים נוכחיים ביטלו בעצם מנועי DC.
מנוע אסינכרוני 2.2 AC
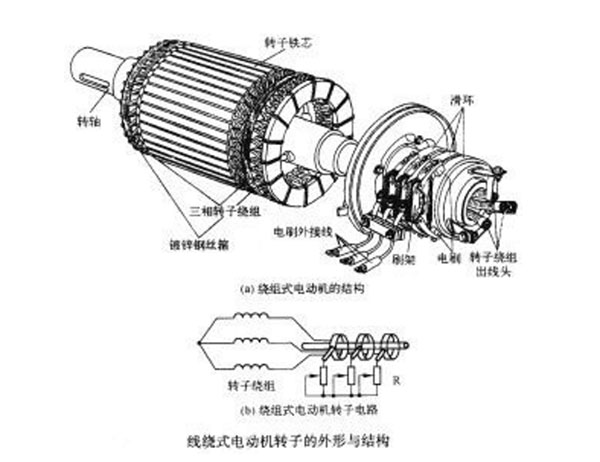
מנוע אסינכרוני AC הוא סוג של מנוע שנמצא בשימוש נרחב בתעשייה. הוא מאופיין בכך שהסטטור והרוטור הם למינציה על ידי יריעות פלדת סיליקון. שני הקצוות ארוזים עם כיסויי אלומיניום. , פעולה אמינה ועמידה, תחזוקה קלה. בהשוואה למנוע DC בעל אותו הספק, המנוע האסינכרוני AC יעיל יותר, והמסה קלה יותר בחצי. אם מאמצים את שיטת הבקרה של בקרת וקטור, ניתן לקבל את יכולת השליטה וטווח ויסות מהירות רחב יותר השווה לזה של מנוע DC. בשל היתרונות של יעילות גבוהה, הספק ספציפי גבוה והתאמה לפעולה במהירות גבוהה, מנועים אסינכרוניים AC הם המנועים הנפוצים ביותר בכלי רכב חשמליים בעלי הספק גבוה. כיום, מנועים אסינכרוניים AC מיוצרים בקנה מידה גדול, וישנם סוגים שונים של מוצרים בוגרים לבחירה. עם זאת, במקרה של פעולה במהירות גבוהה, הרוטור של המנוע מחומם ברצינות, ויש לקרר את המנוע במהלך הפעולה. יחד עם זאת, מערכת ההנעה והבקרה של המנוע האסינכרוני היא מסובכת מאוד, וגם העלות של גוף המנוע גבוהה. בהשוואה למנוע המגנט הקבוע וחוסר הרצון המתחלף עבור מנועים, היעילות וצפיפות ההספק של מנועים אסינכרוניים נמוכים, מה שלא תורם לשיפור הקילומטראז' המרבי של כלי רכב חשמליים.
2.3 מנוע מגנט קבוע
ניתן לחלק מנועי מגנט קבוע לשני סוגים על פי צורות הגל השונות של פיתולי הסטטור, האחד הוא מנוע DC ללא מברשות, בעל זרם גל דופק מלבני; השני הוא מנוע סינכרוני מגנט קבוע, בעל זרם גל סינוס. שני סוגי המנועים זהים בעצם במבנה ובעקרון העבודה. הרוטורים הם מגנטים קבועים, מה שמפחית את האובדן הנגרם כתוצאה מהעירור. הסטטור מותקן עם פיתולים ליצירת מומנט באמצעות זרם חילופין, כך שהקירור קל יחסית. מכיוון שסוג זה של מנוע אינו זקוק להתקנת מברשות ומבנה התמורה מכני, לא יווצרו ניצוצות התמורה במהלך הפעולה, הפעולה בטוחה ואמינה, התחזוקה נוחה וקצב ניצול האנרגיה גבוה.
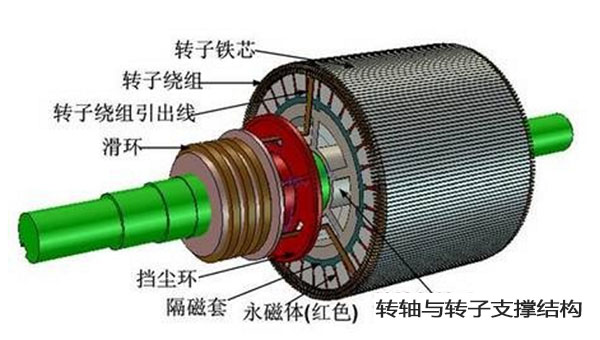
מערכת הבקרה של מנוע המגנט הקבוע פשוטה יותר ממערכת הבקרה של המנוע האסינכרוני AC. עם זאת, בשל המגבלה של תהליך חומר המגנט הקבוע, טווח ההספק של מנוע המגנט הקבוע קטן, וההספק המרבי הוא בדרך כלל רק עשרות מיליונים, וזה החיסרון הגדול ביותר של מנוע המגנט הקבוע. יחד עם זאת, לחומר המגנט הקבוע על הרוטור תהיה תופעה של דעיכה מגנטית בתנאי טמפרטורה גבוהה, רטט וזרם יתר, כך שבתנאי עבודה מורכבים יחסית, מנוע המגנט הקבוע מועד לנזק. יתרה מכך, המחיר של חומרי מגנט קבוע הוא גבוה, ולכן עלות המנוע כולו ומערכת הבקרה שלו גבוהה.
2.4 מנוע סרבנות מיתוג
כסוג חדש של מנוע, למנוע הסרבנות המותג יש את המבנה הפשוט ביותר בהשוואה לסוגים אחרים של מנועי הנעה. הסטטור והרוטור הם שניהם מבנים בולטים כפולים העשויים מיריעות פלדת סיליקון רגילות. אין מבנה על הרוטור. הסטטור מצויד בפיתול מרוכז פשוט, בעל יתרונות רבים כמו מבנה פשוט ומוצק, אמינות גבוהה, משקל קל, עלות נמוכה, יעילות גבוהה, עליית טמפרטורה נמוכה ותחזוקה קלה. יתרה מכך, יש לו את המאפיינים המצוינים של שליטה טובה של מערכת בקרת מהירות DC, והוא מתאים לסביבות קשות, ומתאים מאוד לשימוש כמנוע הנעה לכלי רכב חשמליים.

בהתחשב בכך שכמנועי הנעה של רכב חשמלי, למנועי DC ולמנועי מגנט קבוע יש כושר הסתגלות לקוי במבנה ובסביבת עבודה מורכבת, והם מועדים לכשלים מכניים ודה-מגנטיזציה, מאמר זה מתמקד בהקדמה של מנועי סרבנות ממוגנים ומנועים אסינכרוניים AC. בהשוואה למכונה, יש לה יתרונות ברורים בהיבטים הבאים.
2.4.1 מבנה גוף המנוע
המבנה של מנוע הסרבנות המתחלף פשוט יותר מזה של מנוע האינדוקציה של כלוב הסנאי. היתרון הבולט שלו הוא שאין פיתול על הרוטור, והוא עשוי רק מפלדת סיליקון רגילה. רוב האובדן של המנוע כולו מתרכז בפיתול הסטטור, מה שהופך את המנוע לפשוט לייצור, בעל בידוד טוב, קל לקירור ובעל מאפייני פיזור חום מצוינים. מבנה מנוע זה יכול להקטין את גודלו ומשקלו של המנוע, וניתן להשיגו בנפח קטן. כוח פלט גדול יותר. בשל הגמישות המכאנית הטובה של רוטור המנוע, ניתן להשתמש במנועי סרבנות מוחלפים לפעולה במהירות גבוהה במיוחד.
2.4.2 מעגל הנעה מנוע
זרם הפאזה של מערכת ההנעה של מנוע הרתיעה הוא חד-כיווני ואין לו שום קשר לכיוון המומנט, וניתן להשתמש רק בהתקן מיתוג ראשי אחד כדי לעמוד במצב הפעולה של ארבעת הרבעונים של המנוע. מעגל ממיר הכוח מחובר ישירות בסדרה עם פיתול העירור של המנוע, וכל מעגל פאזה מספק חשמל באופן עצמאי. גם אם פיתול שלב מסוים או בקר המנוע נכשל, הוא רק צריך להפסיק את פעולת השלב מבלי לגרום להשפעה גדולה יותר. לכן, גם גוף המנוע וגם ממיר הכוח בטוחים ואמינים מאוד, ולכן הם מתאימים יותר לשימוש בסביבות קשות מאשר מכונות אסינכרוניות.
2.4.3 היבטי ביצועים של מערכת מוטורית
למנועי חוסר רצון מוחלפים יש פרמטרי בקרה רבים, וקל לעמוד בדרישות של פעולת ארבעת הרביעים של כלי רכב חשמליים באמצעות אסטרטגיות בקרה מתאימות ותכנון מערכת, ויכולים לשמור על יכולת בלימה מצוינת באזורי פעולה במהירות גבוהה. למנועי חוסר רצון מוחלפים יש לא רק יעילות גבוהה, אלא גם שומרים על יעילות גבוהה על פני טווח רחב של ויסות מהירות, שאין כמותה לסוגים אחרים של מערכות הנעה מנועים. ביצועים אלו מתאימים מאוד לתפעול רכבים חשמליים, ומועילים מאוד לשיפור טווח השיוט של כלי רכב חשמליים.
3. מסקנה
המיקוד של מאמר זה הוא להציג את היתרונות של מנוע דחיית מיתוג כמנוע הנעה לכלי רכב חשמליים על ידי השוואה בין מערכות בקרת מהירות מנועי כונן נפוצות בשימוש, המהווה מוקד מחקר בפיתוח כלי רכב חשמליים. עבור סוג זה של מנוע מיוחד, יש עדיין הרבה מקום לפיתוח ביישומים מעשיים. החוקרים צריכים לעשות יותר מאמצים לביצוע מחקר תיאורטי, ובמקביל, יש צורך לשלב את צרכי השוק כדי לקדם את היישום של סוג זה של מנוע בפועל.
זמן פרסום: 24-3-2022