Motor diarahkan arus miniatur seri PX
Ringkasan
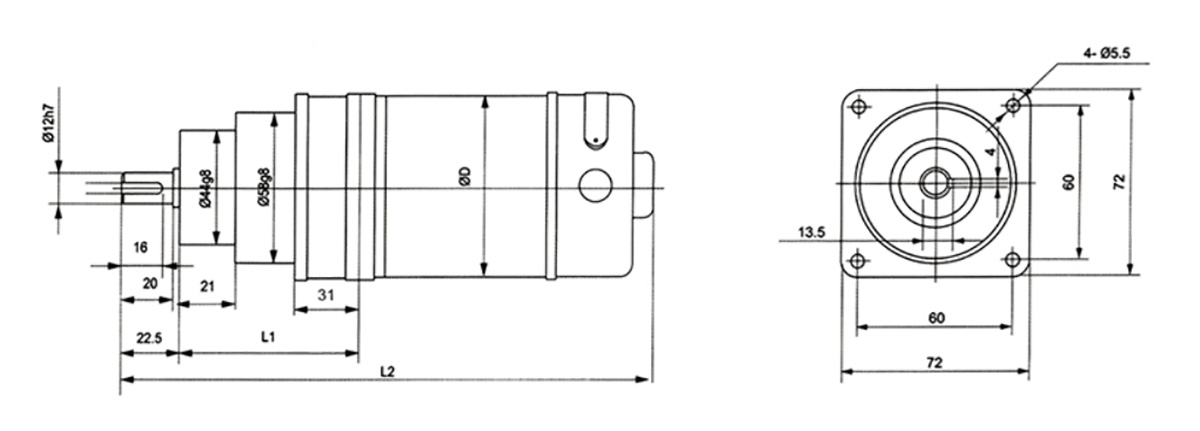
Motor roda gigi DC miniatur seri J-SZ(ZYT)-PX masing-masing terdiri dari motor DC seri SZ(ZYT) dan peredam planet presisi biasa tipe PX, dan dilengkapi dengan catu daya, yang dapat mewujudkan pengaturan kecepatan stepless. Rentang penyesuaian yang luas, ukuran kecil, ringan, efisiensi tinggi, struktur kompak, torsi keluaran besar, banyak digunakan pada penggerak yang memerlukan kecepatan rendah, torsi tinggi, dan pengaturan kecepatan stepless. Kecepatan variabel tak terbatas.
Peredam roda gigi planet seri PX dapat dihubungkan langsung ke motor AC, motor stepper, dan motor lainnya.
Seri PX juga dapat dihubungkan langsung ke peredam roda gigi cacing dan peredam roda gigi sikloidal untuk membentuk peredam dengan rasio kecepatan berbeda atau rasio kecepatan besar.
Instruksi Model Peredam
Model Motorik
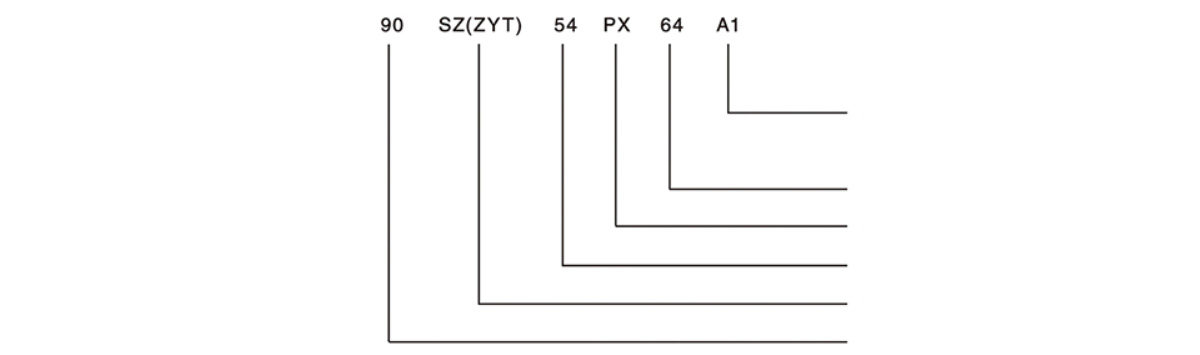
A1- bentuk pemasangan: A1 adalah pemasangan kaki, A3 adalah pemasangan flensa, B5 adalah pemasangan flensa bulat
64 -Rasio pengurangan: 1:64
PX - Peredam Planet Presisi Biasa
54 - Kode parameter kinerja motor
SZ(ZYT ) - Motor Servo DC (Motor DC Magnet Permanen)
90 - Nomor dasar motor: Menunjukkan diameter luar 90mm
Model Peredam
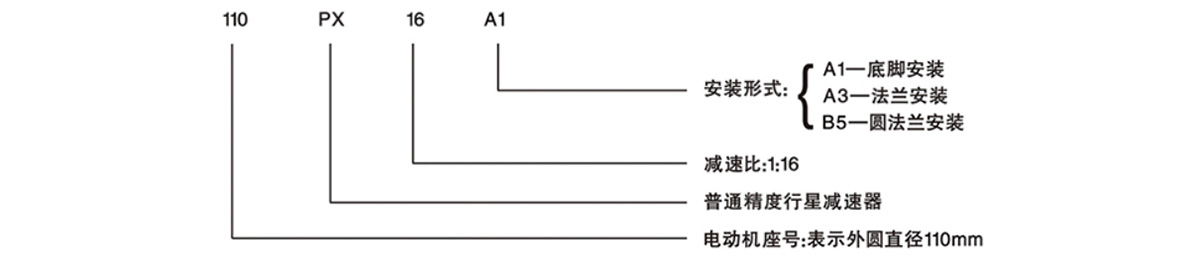
A1- bentuk pemasangan: A1 adalah pemasangan kaki, A3 adalah pemasangan flensa, B5 adalah pemasangan flensa bulat
16 - Rasio pengurangan: 1:64
PX - Peredam Planet Presisi Biasa
110 - Nomor dasar motor: Menunjukkan diameter luar 90mm
Data teknis motor listrik
| Kecepatan (r/mnt) | Torsi (mN.m) | Model | Kekuatan | Kecepatan Terukur (r/mnt) | Memasang | Nilai Tegangan | Kurangi Rasio | Perkataan | |
| 750 | 260 | 55ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187.5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660 | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187.5 | 1270 | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187.5 | 1780 | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
Rasio kecepatan umum seri PS
Tingkat 1: 4, 6
Sekunder: 16, 24, 36
Tingkat 3: 64, 96, 144, 216
Tingkat 4: 2563845768641296
Rasio kecepatan non-standar seri 90PX
Tingkat 1: 3
Tingkat 2: 9, 12, 18
Tingkat 3: 27, 48, 54, 72, 108
Tingkat 4: 81, 162, 192, 288, 324, 432, 648
Rasio kecepatan non-standar seri 110PX
Tingkat 1: 5
Tingkat 2: 20, 25, 30
Tingkat 3: 80, 100, 120, 125, 150, 180
Tingkat 4: 320 , 400 , 480 , 500 , 600 , 625 , 720 , 750 , 900 , 1080
Pereduksi non-standar seperti rasio kecepatan khusus, kecepatan, ukuran pemasangan, dll. dapat dirancang
Contoh seleksi
Pengguna dapat memilih dengan benar daya dan model peredam sesuai dengan sistem kerja aktual dan sifat beban dengan mengacu pada konten berikut.
1.Berdasarkan torsi beban dan kecepatan keluaran peredam, daya yang dibutuhkan dapat dihitung dengan rumus berikut: P=T n/kh
Dalam rumus: P- daya keluaran WT - torsi beban Nm, pilih n- kecepatan keluaran r/mnt sesuai dengan lembar data teknis
K- konstanta beban 9560 η - efisiensi transmisi, dipilih dari tabel berikut
Rasio Transmisi
| Rasio transmisi(i) | 4(6) | 16(36) | 64(216) | 256(1296) |
| η | 0,76 | 0,72 | 0,68 | 0,65 |
2.Pengatur motor dapat dipilih untuk mewujudkan perubahan kecepatan stepless peredam dari O ke kecepatan terukur.
3. Berdasarkan sistem kerja aktual dan sifat beban, koefisien layanan dapat dipilih dengan mengacu pada tabel koefisien layanan. Setelah perhitungan, daya peredam yang dibutuhkan dapat ditentukan, dan sesuai dengan kecepatan keluaran yang diperlukan, model peredam dapat dipilih dengan mengacu pada tabel data teknis.
Lembar Indeks Kerja
| Waktu Kerja Sehari-hari | Tingkat Beban | |||
| Rata-rata stabil | Sedang bersemangat | Dampak yang sangat besar | ||
| 12 | 1 | 1.25 | 1.75 | |
| 24 | 1.25 | 1,50 | 2 | |
Misalnya: jika beban rata dan stabil, daya pengenal motor yang diperlukan adalah 40W, tegangan pengenal 110V, rasio kecepatan keluaran adalah 4, dan waktu kerja per hari adalah 12 jam, maka 40W dipilih. Jika sifat bebannya adalah getaran sedang:
Kemudian: a. Lihat tabel koefisien pelayanan untuk memilih seri pelayanan sebesar 1,25. Daya yang dibutuhkan W=40W*1,25=50W
B. Periksa lembar data teknis untuk J70SZ54P*4 opsional
Flensa depan 70PX
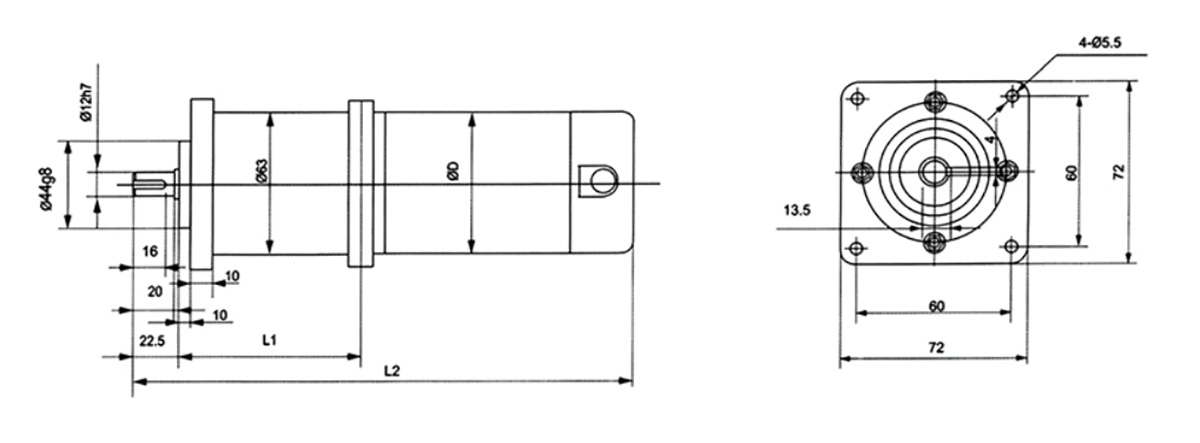
Flensa belakang 70PX