- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu




mesin memasak robot memasak koki dapur beralih motor keengganan
Parameter Motorik
| Tegangan Operasi | DC300V |
| Nilai saat ini | 2,8±10%A |
| Arus maksimum | 5.4A |
| Tegangan awal | DC23V~25V |
| daya terukur | 700±10%W |
| Kecepatan terukur | 35000±10%RPM |
| Kekuatan menganggur | <100W |
| jumlah tiang | 2 |
| torsi | 0,2NM |
| efektivitas | 80%±10% |
| penggantian | CW Aksial |
| kebisingan | maks 96dB,<30cm |
| berat | 1.68Kg |
| bantalan | 2 bantalan bola |
| kontrol | Sensor aula |
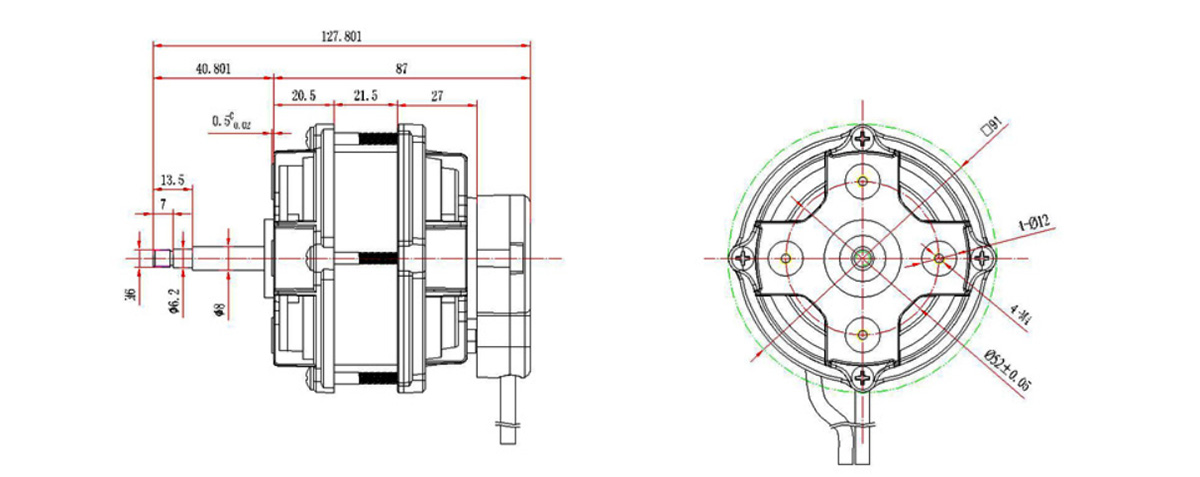
| Memasang | pemasangan flensa |
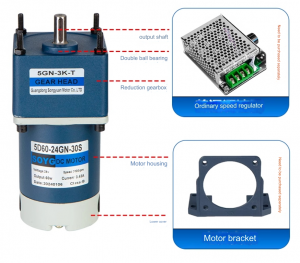
Struktur Motorik
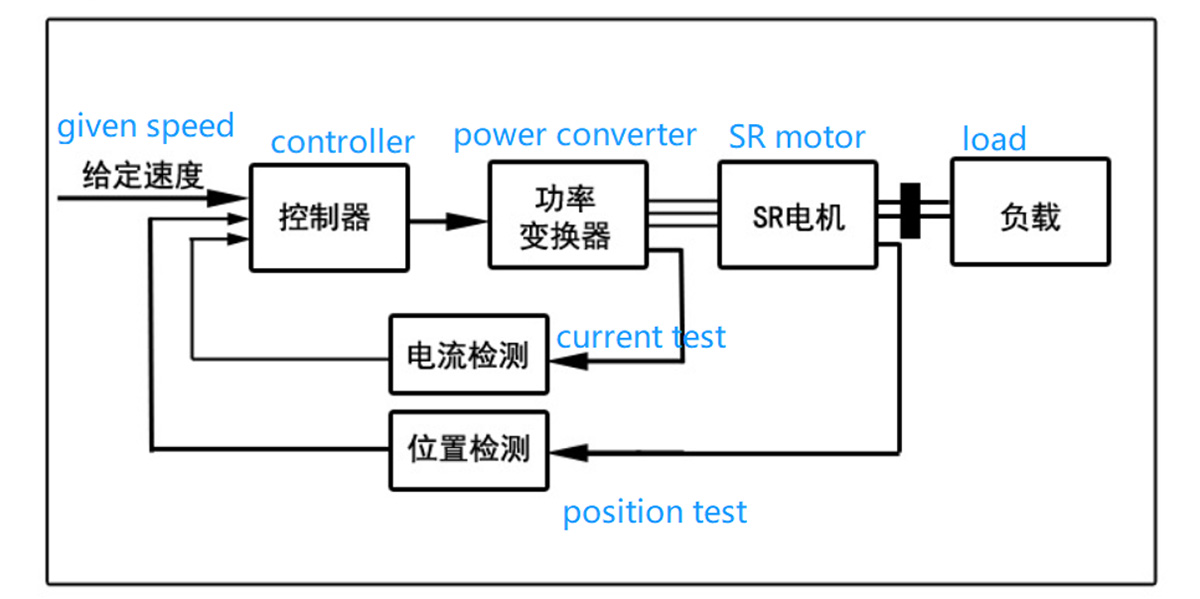
1. Komposisi sistem penggerak motor keengganan yang diaktifkan
Sistem penggerak motor keengganan teralih (SRD) terutama terdiri dari motor keengganan teralih, konverter daya, pengontrol, dan detektor.
2.Beralih motor keengganan
Motor SR dapat dirancang menjadi struktur satu fasa, dua fasa, tiga fasa, empat fasa dan multi fasa dengan nomor fasa berbeda, dan terdapat struktur gigi tunggal per tiang dan struktur multi-gigi per tiang, udara aksial celah, celah udara radial, dan celah udara aksial. Dengan struktur celah udara hibrida radial, struktur rotor dalam dan rotor luar, motor SR di bawah tiga fasa umumnya tidak memiliki kemampuan start sendiri. Sejumlah besar fase bermanfaat untuk mengurangi fluktuasi torsi, namun hal ini menyebabkan struktur yang kompleks, banyak perangkat switching utama dan peningkatan biaya. Saat ini, struktur dua fase 6/4 kutub dan struktur empat fase 8/6 tingkat banyak digunakan.
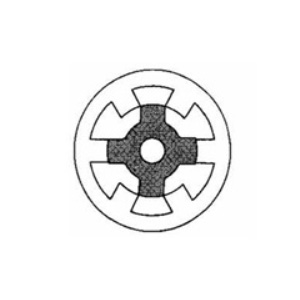
Struktur teratur 3 fase
Motor SR kutub 6/4
3 fase 6/2
motor SR kutub
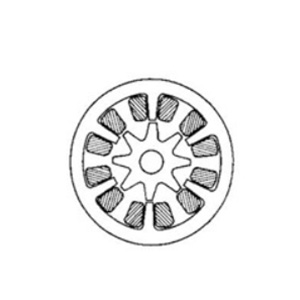
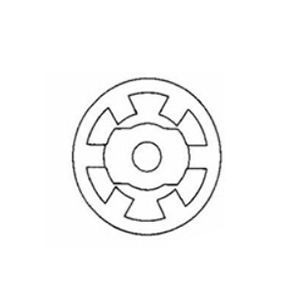
3 fase 6/8
motor SR kutub

3 fase 12/8
motor SR kutub
3. Diagram pengkabelan fisik motor dan pengemudi
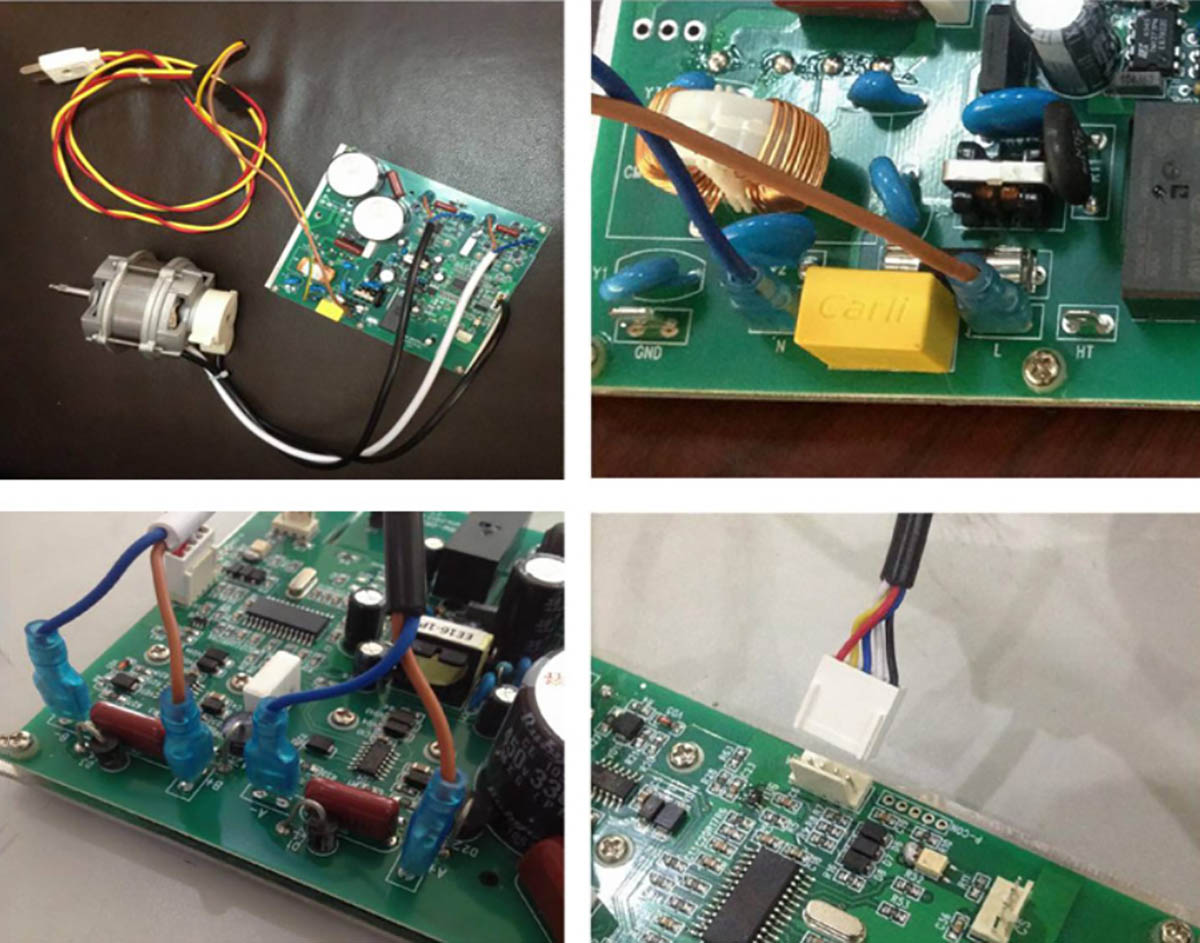
Foto Produk


Kabel fase motor
Hitam (Coklat /A+ Biru /A-), Putih (Coklat /A+ Biru /A- ), panjang kawat L=380 ± 50mm
Pengkabelan kabel aula:
Merah (+5V), hitam (GND), kuning (SA), biru (SB), putih (SC), panjang garis L= panjang garis L=380 ± 50mm
Penyimpanan: 5 ℃ ~40 ℃, kelembapan <90%
Kelas isolasi: F
Kumparan bebas retak berputar selama 3 menit pada 130% tegangan pengenal.
Kehidupan kerja: 2000 jam dalam kondisi kerja normal.
Perpindahan aksial harus kurang dari 0,02 mm saat motor berjalan.
Karakteristik motorik
1.Efisiensi sistem tinggi: Dalam rentang pengaturan kecepatan yang luas, efisiensi keseluruhan setidaknya 10% lebih tinggi dibandingkan sistem pengaturan kecepatan lainnya, dan efisiensi tinggi lebih terlihat jelas pada kecepatan rendah dan beban tidak terukur.
2.Berbagai pengaturan kecepatan, operasi jangka panjang pada kecepatan rendah: Dapat berjalan di bawah beban untuk waktu yang lama dalam kisaran dari nol hingga kecepatan maksimum, dan kenaikan suhu motor dan pengontrol lebih rendah dari pada beban pengenal.
3.Torsi awal yang tinggi, arus awal yang rendah: ketika torsi awal mencapai 150% dari torsi pengenal, arus awal hanya 30% dari arus pengenal.
4. Ia dapat sering memulai dan berhenti, dan beralih antara rotasi maju dan mundur: ia dapat sering memulai dan berhenti, dan sering beralih antara rotasi maju dan mundur. Jika terdapat unit pengereman dan daya pengereman memenuhi kebutuhan waktu, maka peralihan start-stop dan maju-mundur dapat mencapai lebih dari 1.000 kali per jam.
5. Kapasitas kelebihan beban yang kuat: ketika beban jauh lebih besar dari beban pengenal dalam waktu singkat, kecepatan akan turun, daya keluaran maksimum akan dipertahankan, dan tidak akan ada fenomena arus lebih. Ketika beban kembali normal, kecepatan kembali ke kecepatan yang disetel.
6.Kekuatan mekanik dan keandalannya lebih tinggi dibandingkan jenis motor lainnya. Rotor tidak memiliki magnet permanen dan dapat memiliki kenaikan suhu lebih tinggi yang diijinkan.
Aplikasi
Kipas angin dan mesin memasak
Kategori produk
-

Rakitan motor dan pengontrol AC 10kw 96V untuk ...
-

Motor keengganan yang diaktifkan digunakan dalam ...
-

Konversi Bus Mobil Listrik Motor AC 10kw 72v ...
-

Suku cadang motor sinkron listrik 1.2k 32V AC untuk...
-
Motor reduksi DC 5D60-24GU-30S 12v24v
-

Suku cadang motor sinkron listrik 1.2k 32V AC untuk...