Էլեկտրական մեքենաները հիմնականում բաղկացած են երեք մասից՝ շարժիչի շարժիչ համակարգ, մարտկոցի համակարգ և մեքենայի կառավարման համակարգ: Շարժիչի շարժիչ համակարգը այն մասն է, որն ուղղակիորեն փոխակերպում է էլեկտրական էներգիան մեխանիկական էներգիայի, որը որոշում է էլեկտրական մեքենաների կատարողականի ցուցանիշները: Հետևաբար, շարժիչ շարժիչի ընտրությունը հատկապես կարևոր է:
Շրջակա միջավայրի պահպանության միջավայրում վերջին տարիներին հետազոտական թեժ կետ են դարձել նաև էլեկտրական մեքենաները։ Էլեկտրական մեքենաները կարող են հասնել զրոյական կամ շատ ցածր արտանետումների քաղաքային երթևեկության մեջ և հսկայական առավելություններ ունեն շրջակա միջավայրի պաշտպանության ոլորտում: Բոլոր երկրները քրտնաջան աշխատում են էլեկտրական մեքենաների զարգացման ուղղությամբ։ Էլեկտրական մեքենաները հիմնականում բաղկացած են երեք մասից՝ շարժիչի շարժիչ համակարգ, մարտկոցի համակարգ և մեքենայի կառավարման համակարգ: Շարժիչի շարժիչ համակարգը այն մասն է, որն ուղղակիորեն փոխակերպում է էլեկտրական էներգիան մեխանիկական էներգիայի, որը որոշում է էլեկտրական մեքենաների կատարողականի ցուցանիշները: Հետևաբար, շարժիչ շարժիչի ընտրությունը հատկապես կարևոր է:
1. Էլեկտրական տրանսպորտային միջոցների պահանջները շարժիչ շարժիչների համար
Ներկայումս էլեկտրական մեքենաների կատարողականի գնահատումը հիմնականում հաշվի է առնում կատարողականի հետևյալ երեք ցուցանիշները.
(1) Առավելագույն վազքը (կմ). էլեկտրական մեքենայի առավելագույն վազքը մարտկոցի լրիվ լիցքավորումից հետո.
2) արագացման կարողություն (ներ)՝ նվազագույն ժամանակը, որն անհրաժեշտ է էլեկտրական մեքենային կանգառից մինչև որոշակի արագություն արագացնելու համար.
(3) Առավելագույն արագություն (կմ/ժ)՝ առավելագույն արագությունը, որին կարող է հասնել էլեկտրական մեքենան։
Էլեկտրական տրանսպորտային միջոցների շարժիչ բնութագրերի համար նախատեսված շարժիչները ունեն աշխատանքի հատուկ պահանջներ՝ համեմատած արդյունաբերական շարժիչների հետ.
(1) Էլեկտրական տրանսպորտային միջոցի շարժիչ շարժիչը սովորաբար պահանջում է բարձր դինամիկ կատարողական պահանջներ հաճախակի մեկնարկի/դադարի, արագացման/դանդաղեցման և ոլորող մոմենտ կառավարելու համար.
(2) Ամբողջ մեքենայի քաշը նվազեցնելու համար բազմարագ փոխանցումը սովորաբար չեղյալ է հայտարարվում, ինչը պահանջում է, որ շարժիչը կարող է ավելի մեծ ոլորող մոմենտ ապահովել ցածր արագությամբ կամ լանջով բարձրանալիս, և սովորաբար կարող է դիմակայել 4-5 անգամ: գերբեռնվածություն;
(3) արագության կարգավորման միջակայքը պետք է լինի հնարավորինս մեծ, և միևնույն ժամանակ անհրաժեշտ է պահպանել գործառնական բարձր արդյունավետությունը արագության կարգավորման ողջ տիրույթում.
(4) Շարժիչը նախատեսված է հնարավորինս բարձր գնահատված արագություն ունենալու համար, և միևնույն ժամանակ, հնարավորինս օգտագործվում է ալյումինե խառնուրդի պատյան: Բարձր արագությամբ շարժիչը փոքր չափի է, ինչը նպաստում է էլեկտրական մեքենաների քաշը նվազեցնելու համար.
(5) Էլեկտրական մեքենաները պետք է ունենան էներգիայի օպտիմալ օգտագործում և ունենան արգելակման էներգիայի վերականգնման գործառույթ: Վերականգնողական արգելակման արդյունքում վերականգնվող էներգիան ընդհանուր առմամբ պետք է հասնի ընդհանուր էներգիայի 10%-20%-ին.
(6) Էլեկտրական տրանսպորտային միջոցներում օգտագործվող շարժիչի աշխատանքային միջավայրը ավելի բարդ և կոշտ է, ինչը պահանջում է, որ շարժիչը ունենա լավ հուսալիություն և շրջակա միջավայրի հարմարվողականություն, և միևնույն ժամանակ ապահովել, որ շարժիչի արտադրության արժեքը չի կարող չափազանց բարձր լինել:
2. Մի քանի սովորաբար օգտագործվող շարժիչ շարժիչներ
2.1 DC շարժիչ
Էլեկտրական մեքենաների զարգացման սկզբնական փուլում էլեկտրական մեքենաների մեծ մասը որպես շարժիչ շարժիչներ օգտագործում էր DC շարժիչներ: Շարժիչային տեխնոլոգիայի այս տեսակը համեմատաբար հասուն է, հեշտ կառավարման մեթոդներով և արագության գերազանց կարգավորմամբ: Այն նախկինում ամենաշատն էր օգտագործվում արագության կարգավորման շարժիչների ոլորտում։ . Այնուամենայնիվ, DC շարժիչի բարդ մեխանիկական կառուցվածքի պատճառով, ինչպիսիք են խոզանակները և մեխանիկական կոմուտատորները, դրա ակնթարթային ծանրաբեռնվածության հզորությունը և շարժիչի արագության հետագա աճը սահմանափակ են, իսկ երկարատև աշխատանքի դեպքում՝ մեխանիկական կառուցվածքը։ շարժիչը կլինի Կորուստը առաջանում է, և պահպանման ծախսերը մեծանում են: Բացի այդ, երբ շարժիչը աշխատում է, խոզանակներից առաջացած կայծերը ստիպում են ռոտորին տաքացնել, վատնել էներգիան, դժվարացնել ջերմությունը, ինչպես նաև առաջացնել բարձր հաճախականության էլեկտրամագնիսական միջամտություն, որն ազդում է մեքենայի աշխատանքի վրա: DC շարժիչների վերը նշված թերությունների պատճառով ընթացիկ էլեկտրական մեքենաները հիմնականում վերացրել են DC շարժիչները:
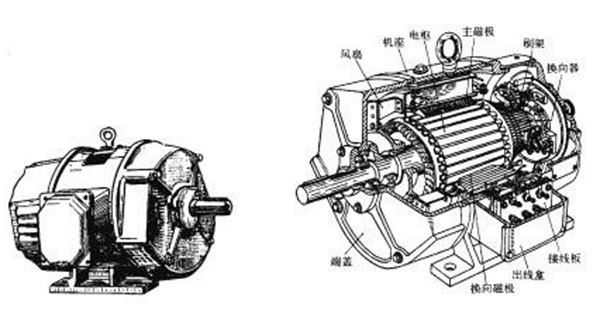
2.2 AC ասինխրոն շարժիչ
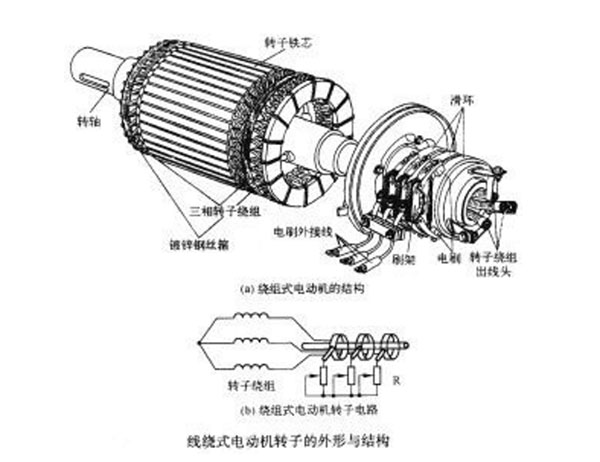
AC ասինխրոն շարժիչը շարժիչի տեսակ է, որը լայնորեն օգտագործվում է արդյունաբերության մեջ: Այն բնութագրվում է նրանով, որ ստատորը և ռոտորը լամինացված են սիլիկոնե պողպատե թիթեղներով: Երկու ծայրերը փաթեթավորված են ալյումինե ծածկոցներով: , հուսալի և երկարակյաց շահագործում, հեշտ սպասարկում: Համեմատած նույն հզորության DC շարժիչի հետ, AC ասինխրոն շարժիչը ավելի արդյունավետ է, իսկ զանգվածը մոտ մեկ կես ավելի թեթև է: Եթե ընդունվի վեկտորի հսկողության կառավարման մեթոդը, կարելի է ձեռք բերել կառավարելիություն և արագության կարգավորման ավելի լայն շրջանակ, որը համեմատելի է DC շարժիչի հետ: Բարձր արդյունավետության, բարձր հատուկ հզորության և բարձր արագությամբ շահագործման համար պիտանիության առավելությունների պատճառով AC ասինխրոն շարժիչները ամենաշատ օգտագործվող շարժիչներն են բարձր հզորության էլեկտրական մեքենաներում: Ներկայումս AC ասինխրոն շարժիչներ արտադրվել են մեծ մասշտաբով, և կան տարբեր տեսակի հասուն արտադրանքներ, որոնցից կարելի է ընտրել: Այնուամենայնիվ, բարձր արագությամբ շահագործման դեպքում շարժիչի ռոտորը լրջորեն տաքացվում է, և շարժիչը պետք է սառեցվի շահագործման ընթացքում: Միևնույն ժամանակ, ասինխրոն շարժիչի շարժիչ և կառավարման համակարգը շատ բարդ է, և շարժիչի մարմնի արժեքը նույնպես բարձր է: Մշտական մագնիսի շարժիչի և անջատման դժկամության համեմատ շարժիչների համար ասինխրոն շարժիչների արդյունավետությունը և հզորության խտությունը ցածր են, ինչը չի նպաստում էլեկտրական մեքենաների առավելագույն վազքը բարելավելու համար:
2.3 Մշտական մագնիսական շարժիչ
Մշտական մագնիսական շարժիչները կարելի է բաժանել երկու տեսակի՝ ըստ ստատորի ոլորունների հոսանքի տարբեր ալիքի ձևերի, մեկը՝ առանց խոզանակի DC շարժիչ, որն ունի ուղղանկյուն իմպուլսային ալիքի հոսանք. մյուսը մշտական մագնիսով համաժամանակյա շարժիչ է, որն ունի սինուսային ալիքի հոսանք: Երկու տեսակի շարժիչները հիմնականում նույնն են կառուցվածքով և աշխատանքի սկզբունքով: Ռոտորները մշտական մագնիսներ են, ինչը նվազեցնում է գրգռման հետևանքով առաջացած կորուստը: Ստատորը տեղադրված է ոլորուններով՝ փոփոխական հոսանքի միջոցով ոլորող մոմենտ ստեղծելու համար, ուստի սառեցումը համեմատաբար հեշտ է: Քանի որ այս տեսակի շարժիչը կարիք չունի խոզանակների և մեխանիկական կոմուտացիայի կառուցվածքի տեղադրմանը, շահագործման ընթացքում կոմուտացիոն կայծեր չեն առաջանա, շահագործումն ապահով և հուսալի է, սպասարկումը հարմար է, իսկ էներգիայի օգտագործման արագությունը բարձր է:
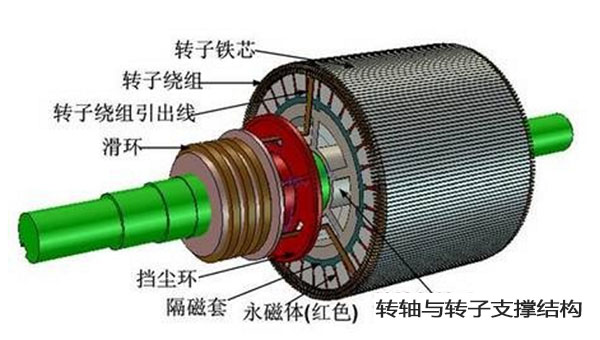
Մշտական մագնիսական շարժիչի կառավարման համակարգը ավելի պարզ է, քան AC ասինխրոն շարժիչի կառավարման համակարգը: Այնուամենայնիվ, մշտական մագնիսական նյութի գործընթացի սահմանափակման պատճառով մշտական մագնիսական շարժիչի հզորության միջակայքը փոքր է, և առավելագույն հզորությունը, ընդհանուր առմամբ, ընդամենը տասնյակ միլիոն է, ինչը մշտական մագնիսական շարժիչի ամենամեծ թերությունն է: Միևնույն ժամանակ, ռոտորի վրա մշտական մագնիսական նյութը կունենա մագնիսական քայքայման երևույթ բարձր ջերմաստիճանի, թրթռանքի և գերհոսանքի պայմաններում, ուստի համեմատաբար բարդ աշխատանքային պայմաններում մշտական մագնիսական շարժիչը հակված է վնասվելու: Ավելին, մշտական մագնիսական նյութերի գինը բարձր է, ուստի ամբողջ շարժիչի և դրա կառավարման համակարգի արժեքը բարձր է:
2.4 Անջատիչ դժկամության շարժիչ
Որպես շարժիչի նոր տեսակ, անջատված դժկամությամբ շարժիչն ունի ամենապարզ կառուցվածքը` համեմատած այլ տեսակի շարժիչների: Ստատորը և ռոտորը երկուսն էլ կրկնակի ընդգծված կառույցներ են, որոնք պատրաստված են սովորական սիլիցիումի պողպատե թիթեղներից: Ռոտորի վրա կառուցվածք չկա: Ստատորը հագեցած է պարզ կենտրոնացված ոլորունով, որն ունի բազմաթիվ առավելություններ, ինչպիսիք են պարզ և ամուր կառուցվածքը, բարձր հուսալիությունը, թեթև քաշը, ցածր արժեքը, բարձր արդյունավետությունը, ցածր ջերմաստիճանի բարձրացումը և հեշտ սպասարկումը: Ավելին, այն ունի DC արագության կառավարման համակարգի լավ կառավարելիության գերազանց բնութագրեր և հարմար է կոշտ միջավայրերի համար և շատ հարմար է էլեկտրական մեքենաների շարժիչ շարժիչ օգտագործելու համար:

Հաշվի առնելով, որ որպես էլեկտրական մեքենաների շարժիչ շարժիչներ, DC շարժիչներ և մշտական մագնիսական շարժիչներ կառուցվածքում և բարդ աշխատանքային միջավայրում ունեն թույլ հարմարվողականություն և հակված են մեխանիկական և ապամագնիսացման ձախողումների, այս հոդվածը կենտրոնանում է անջատիչ դժկամությամբ շարժիչների և AC ասինխրոն շարժիչների ներդրման վրա: Մեքենայի հետ համեմատած, այն ակնհայտ առավելություններ ունի հետևյալ առումներով.
2.4.1 Շարժիչի մարմնի կառուցվածքը
Միացված դժկամությամբ շարժիչի կառուցվածքն ավելի պարզ է, քան սկյուռային վանդակի ինդուկցիոն շարժիչը: Դրա ակնառու առավելությունն այն է, որ ռոտորի վրա ոլորուն չկա, և այն պատրաստված է միայն սովորական սիլիկոնե պողպատե թիթեղներից: Ամբողջ շարժիչի կորստի մեծ մասը կենտրոնացած է ստատորի ոլորման վրա, ինչը շարժիչը դարձնում է հեշտ արտադրվող, ունի լավ մեկուսացում, հեշտ է սառչել և ունի ջերմության ցրման գերազանց բնութագրեր: Շարժիչի այս կառուցվածքը կարող է նվազեցնել շարժիչի չափը և քաշը և կարելի է ձեռք բերել փոքր ծավալով: ավելի մեծ ելքային հզորություն: Շարժիչի ռոտորի լավ մեխանիկական առաձգականության շնորհիվ անջատված դժկամությամբ շարժիչները կարող են օգտագործվել գերարագ աշխատանքի համար:
2.4.2 Շարժիչի շարժիչի միացում
Միացված դժկամությամբ շարժիչի շարժիչ համակարգի փուլային հոսանքը միակողմանի է և կապ չունի ոլորող մոմենտների ուղղության հետ, և միայն մեկ հիմնական անջատիչ սարքը կարող է օգտագործվել շարժիչի չորս քառակուսի գործառնական վիճակը բավարարելու համար: Էլեկտրաէներգիայի փոխարկիչի սխեման ուղղակիորեն միացված է շարժիչի գրգռման ոլորուն հաջորդականությամբ, և յուրաքանչյուր փուլային շղթա ինքնուրույն էներգիա է մատակարարում: Նույնիսկ եթե որոշակի փուլի ոլորուն կամ շարժիչի կարգավորիչը ձախողվի, այն միայն պետք է դադարեցնի փուլի աշխատանքը՝ առանց ավելի մեծ ազդեցություն պատճառելու: Հետևաբար, և՛ շարժիչի մարմինը, և՛ հզորության փոխարկիչը շատ անվտանգ և հուսալի են, ուստի դրանք ավելի հարմար են կոշտ միջավայրում օգտագործելու համար, քան ասինխրոն մեքենաները:
2.4.3 Շարժիչային համակարգի կատարողականի կողմերը
Անջատիչ դժկամությամբ շարժիչներն ունեն բազմաթիվ հսկողության պարամետրեր, և հեշտ է բավարարել էլեկտրական մեքենաների չորս քառակուսի շահագործման պահանջները համապատասխան կառավարման ռազմավարությունների և համակարգի ձևավորման միջոցով և կարող են պահպանել գերազանց արգելակման ունակություն բարձր արագությամբ շահագործման տարածքներում: Անջատիչ դժկամությամբ շարժիչները ոչ միայն ունեն բարձր արդյունավետություն, այլև պահպանում են բարձր արդյունավետություն արագության կարգավորման լայն տիրույթում, որը չի համընկնում շարժիչի շարժիչ համակարգերի այլ տեսակների հետ: Այս կատարումը շատ հարմար է էլեկտրական մեքենաների շահագործման համար և շատ օգտակար է էլեկտրական մեքենաների նավարկության շրջանակը բարելավելու համար:
3. Եզրակացություն
Այս փաստաթղթի նպատակն է առաջ քաշել անջատված դժկամությամբ շարժիչի առավելությունները՝ որպես էլեկտրական մեքենաների շարժիչ շարժիչ՝ համեմատելով շարժիչ շարժիչի արագության կառավարման տարբեր համակարգերը, որոնք հետազոտական թեժ կետ են էլեկտրական մեքենաների զարգացման մեջ: Այս տեսակի հատուկ շարժիչի համար դեռ շատ տեղ կա գործնական կիրառությունների զարգացման համար: Հետազոտողները պետք է ավելի շատ ջանքեր գործադրեն տեսական հետազոտություններ իրականացնելու համար, և միևնույն ժամանակ անհրաժեշտ է համատեղել շուկայի կարիքները՝ խթանելու այս տեսակի շարժիչների կիրառումը գործնականում:
Հրապարակման ժամանակը՝ Մար-24-2022