Sähköajoneuvot koostuvat pääasiassa kolmesta osasta: moottorikäyttöjärjestelmä, akkujärjestelmä ja ajoneuvon ohjausjärjestelmä. Moottorikäyttöjärjestelmä on osa, joka muuntaa sähköenergian suoraan mekaaniseksi energiaksi, joka määrittää sähköajoneuvojen suorituskykyindikaattorit. Siksi käyttömoottorin valinta on erityisen tärkeää.
Ympäristönsuojeluympäristössä sähköajoneuvoista on tullut myös viime vuosina tutkimuskohde. Sähköautot voivat saavuttaa nollapäästöt tai erittäin alhaiset päästöt kaupunkiliikenteessä, ja niillä on valtavia etuja ympäristönsuojelun alalla. Kaikki maat tekevät lujasti töitä kehittääkseen sähköautoja. Sähköajoneuvot koostuvat pääasiassa kolmesta osasta: moottorikäyttöjärjestelmä, akkujärjestelmä ja ajoneuvon ohjausjärjestelmä. Moottorikäyttöjärjestelmä on osa, joka muuntaa sähköenergian suoraan mekaaniseksi energiaksi, joka määrittää sähköajoneuvojen suorituskykyindikaattorit. Siksi käyttömoottorin valinta on erityisen tärkeää.
1. Käyttömoottoreiden sähköajoneuvojen vaatimukset
Tällä hetkellä sähköajoneuvojen suorituskyvyn arvioinnissa otetaan huomioon pääasiassa seuraavat kolme suorituskykyindikaattoria:
(1) Suurin kilometrimäärä (km): sähköajoneuvon suurin ajokilometrimäärä akun täyteen latauksen jälkeen;
(2) Kiihdytyskyky (s): vähimmäisaika, joka tarvitaan sähköajoneuvon kiihtymiseen pysähdyksestä tiettyyn nopeuteen;
(3) Suurin nopeus (km/h): suurin nopeus, jonka sähköajoneuvo voi saavuttaa.
Sähköajoneuvojen ajo-ominaisuuksiin suunnitelluilla moottoreilla on erityisiä suorituskykyvaatimuksia verrattuna teollisuusmoottoreihin:
(1) Sähköajoneuvon käyttömoottori vaatii yleensä korkeita dynaamisia suorituskykyvaatimuksia toistuvaa käynnistystä/pysähdystä, kiihdytystä/hidastusta ja vääntömomentin hallintaa varten;
(2) Koko ajoneuvon painon vähentämiseksi moninopeuksinen vaihteisto yleensä peruutetaan, mikä edellyttää, että moottori pystyy tarjoamaan suuremman vääntömomentin alhaisella nopeudella tai kiipeämään rinteeseen ja kestää yleensä 4-5 kertaa ylikuormitus;
(3) Nopeudensäätöalueen on oltava mahdollisimman suuri, ja samalla on välttämätöntä säilyttää korkea toimintatehokkuus koko nopeudensäätöalueella;
(4) Moottori on suunniteltu niin, että sen nimellisnopeus on mahdollisimman korkea, ja samalla käytetään mahdollisimman paljon alumiiniseoskoteloa. Nopea moottori on kooltaan pieni, mikä vähentää sähköajoneuvojen painoa;
(5) Sähköajoneuvoissa olisi oltava optimaalinen energiankäyttö ja jarrutusenergian talteenottotoiminto. Regeneratiivisella jarrutuksella talteen otetun energian tulisi yleensä olla 10–20 % kokonaisenergiasta;
(6) Sähköajoneuvoissa käytettävän moottorin työympäristö on monimutkaisempi ja ankarampi, mikä edellyttää moottorilta hyvää luotettavuutta ja ympäristöön sopeutumiskykyä ja samalla sen varmistamista, että moottorin tuotantokustannukset eivät voi olla liian korkeita.
2. Useita yleisesti käytettyjä käyttömoottoreita
2.1 DC moottori
Sähköajoneuvojen kehityksen alkuvaiheessa useimmat sähköajoneuvot käyttivät käyttömoottoreina tasavirtamoottoreita. Tämäntyyppinen moottoritekniikka on suhteellisen kypsä, ja siinä on helppoja ohjausmenetelmiä ja erinomainen nopeudensäätö. Sitä käytettiin aiemmin yleisimmin nopeudensäätömoottoreiden alalla. . DC-moottorin monimutkaisen mekaanisen rakenteen, kuten: harjat ja mekaaniset kommutaattorit, vuoksi sen hetkellinen ylikuormituskyky ja moottorin nopeuden lisäys ovat kuitenkin rajallisia, ja pitkäaikaistyössä sen mekaaninen rakenne on rajoitettu. moottori häviää ja huoltokustannukset kasvavat. Lisäksi, kun moottori on käynnissä, harjojen kipinät saavat roottorin lämpenemään, kuluttavat energiaa, vaikeuttavat lämmön haihtumista ja aiheuttavat myös korkeataajuisia sähkömagneettisia häiriöitä, jotka vaikuttavat ajoneuvon suorituskykyyn. Edellä mainittujen DC-moottoreiden puutteiden vuoksi nykyiset sähköajoneuvot ovat käytännössä eliminoineet tasavirtamoottorit.
2.2 AC asynkroninen moottori
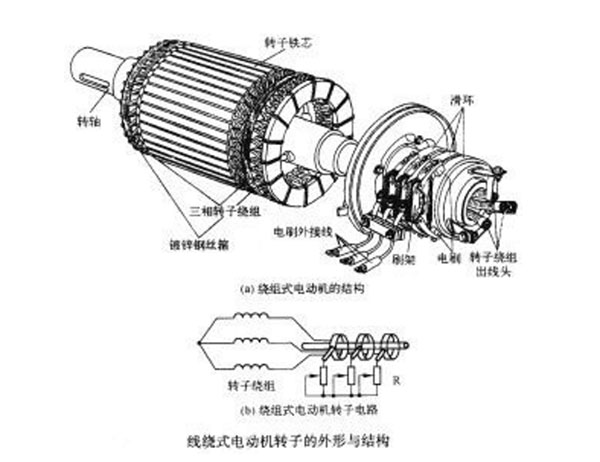
AC asynkroninen moottori on moottorityyppi, jota käytetään laajasti teollisuudessa. Sille on tunnusomaista, että staattori ja roottori on laminoitu piiteräslevyillä. Molemmat päät on pakattu alumiinisuojuksiin. , luotettava ja kestävä toiminta, helppo huolto. Verrattuna samantehoiseen tasavirtamoottoriin AC asynkroninen moottori on tehokkaampi ja massa on noin puolet kevyempi. Jos vektoriohjauksen ohjausmenetelmää käytetään, voidaan saavuttaa tasavirtamoottoriin verrattavissa oleva ohjattavuus ja laajempi nopeuden säätöalue. Korkean hyötysuhteen, suuren ominaistehon ja nopeaan käyttöön soveltuvuuden ansiosta AC-asynkroniset moottorit ovat laajimmin käytettyjä moottoreita suuritehoisissa sähköajoneuvoissa. Tällä hetkellä AC asynkronisia moottoreita on valmistettu suuressa mittakaavassa, ja valittavana on erilaisia kypsiä tuotteita. Suurinopeuksisessa käytössä moottorin roottori kuitenkin kuumenee voimakkaasti ja moottoria on jäähdytettävä käytön aikana. Samaan aikaan asynkronisen moottorin käyttö- ja ohjausjärjestelmä on erittäin monimutkainen, ja myös moottorin rungon hinta on korkea. Kestomagneettimoottoriin ja kytkentäreluktanssiin verrattuna Moottoreiden osalta asynkronisten moottoreiden hyötysuhde ja tehotiheys ovat alhaiset, mikä ei edistä sähköajoneuvojen maksimikilometrimäärän parantamista.
2.3 Kestomagneettimoottori
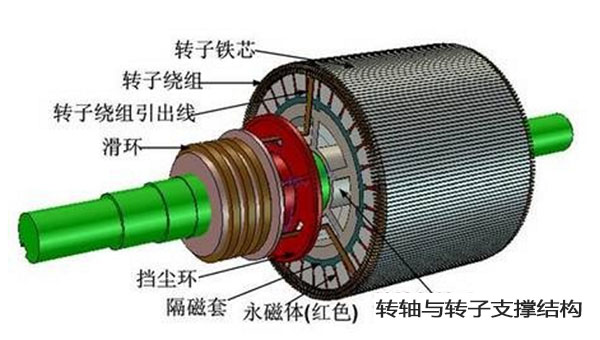
Kestomagneettimoottorit voidaan jakaa kahteen tyyppiin staattorikäämien eri virran aaltomuotojen mukaan, yksi on harjaton tasavirtamoottori, jolla on suorakaiteen muotoinen pulssiaaltovirta; toinen on kestomagneettisynkroninen moottori, jossa on siniaaltovirta. Nämä kaksi moottorityyppiä ovat rakenteeltaan ja toimintaperiaatteeltaan periaatteessa samat. Roottorit ovat kestomagneetteja, mikä vähentää virityksen aiheuttamaa häviötä. Staattori on asennettu käämityksellä, joka tuottaa vääntömomentin vaihtovirralla, joten jäähdytys on suhteellisen helppoa. Koska tämäntyyppiseen moottoriin ei tarvitse asentaa harjoja ja mekaanista kommutointirakennetta, toiminnan aikana ei synny kommutointikipinöitä, toiminta on turvallista ja luotettavaa, huolto on kätevää ja energian käyttöaste on korkea.
Kestomagneettimoottorin ohjausjärjestelmä on yksinkertaisempi kuin AC-asynkronisen moottorin ohjausjärjestelmä. Kestomagneettimateriaaliprosessin rajoituksista johtuen kestomagneettimoottorin tehoalue on kuitenkin pieni ja maksimiteho on yleensä vain kymmeniä miljoonia, mikä on kestomagneettimoottorin suurin haitta. Samaan aikaan roottorin kestomagneettimateriaalilla on magneettinen vaimeneminen korkean lämpötilan, tärinän ja ylivirran olosuhteissa, joten suhteellisen monimutkaisissa työolosuhteissa kestomagneettimoottori on altis vaurioitumiselle. Lisäksi kestomagneettimateriaalien hinta on korkea, joten koko moottorin ja sen ohjausjärjestelmän hinta on korkea.
2.4 Kytketty reluktanssimoottori
Uutena moottorityyppinä kytketyllä reluktanssimoottorilla on yksinkertaisin rakenne verrattuna muuntyyppisiin käyttömoottoreihin. Staattori ja roottori ovat kumpikin kaksoispaistettuja rakenteita, jotka on valmistettu tavallisista piiteräslevyistä. Roottorissa ei ole rakennetta. Staattori on varustettu yksinkertaisella tiivistetyllä käämityksellä, jolla on monia etuja, kuten yksinkertainen ja vankka rakenne, korkea luotettavuus, kevyt paino, alhaiset kustannukset, korkea hyötysuhde, alhainen lämpötilan nousu ja helppo huolto. Lisäksi sillä on erinomaiset DC-nopeudensäätöjärjestelmän hyvän ohjattavuuden ominaisuudet, ja se soveltuu ankariin ympäristöihin ja sopii hyvin käytettäväksi sähköajoneuvojen käyttömoottorina.

Ottaen huomioon, että sähköajoneuvojen käyttömoottoreilla, tasavirtamoottoreilla ja kestomagneettimoottoreilla on huono sopeutumiskyky rakenteeltaan ja monimutkaisilta työympäristöiltä ja ne ovat alttiita mekaanisille ja demagnetointihäiriöille, tässä artikkelissa keskitytään kytkettyjen reluktanssimoottorien ja AC-asynkronisten moottoreiden käyttöönottoon. Koneeseen verrattuna sillä on ilmeisiä etuja seuraavissa asioissa.
2.4.1 Moottorin rungon rakenne
Kytketyn reluktanssimoottorin rakenne on yksinkertaisempi kuin oikosulkumoottorin. Sen erinomainen etu on, että roottorissa ei ole käämiä ja se on valmistettu vain tavallisista piiteräslevyistä. Suurin osa koko moottorin häviöstä keskittyy staattorikäämiin, mikä tekee moottorista yksinkertaisen valmistuksen, sillä on hyvä eristys, helppo jäähdyttää ja sillä on erinomaiset lämmönpoisto-ominaisuudet. Tämä moottorirakenne voi pienentää moottorin kokoa ja painoa, ja se voidaan saada pienellä tilavuudella. suurempi lähtöteho. Moottorin roottorin hyvän mekaanisen elastisuuden ansiosta kytkentäreluktanssimoottoreita voidaan käyttää erittäin nopeaan toimintaan.
2.4.2 Moottorin käyttöpiiri
Kytketyn reluktanssimoottorin käyttöjärjestelmän vaihevirta on yksisuuntainen eikä sillä ole mitään tekemistä vääntömomentin suunnan kanssa, ja vain yhtä pääkytkinlaitetta voidaan käyttää täyttämään moottorin neljän neljänneksen toimintatila. Tehonmuunninpiiri on kytketty suoraan sarjaan moottorin virityskäämin kanssa, ja jokainen vaihepiiri syöttää virtaa itsenäisesti. Vaikka jokin vaihekäämi tai moottorin ohjain epäonnistuu, sen tarvitsee vain pysäyttää vaiheen toiminta aiheuttamatta suurempaa vaikutusta. Siksi sekä moottorin runko että tehomuunnin ovat erittäin turvallisia ja luotettavia, joten ne sopivat paremmin käytettäväksi ankarissa ympäristöissä kuin asynkroniset koneet.
2.4.3 Moottorijärjestelmän suorituskykynäkökohdat
Kytketyillä reluktanssimoottoreilla on monia ohjausparametreja, ja sähköajoneuvojen neljän neljänneksen toiminnan vaatimukset on helppo täyttää asianmukaisten ohjausstrategioiden ja järjestelmäsuunnittelun avulla, ja ne voivat säilyttää erinomaisen jarrutuskyvyn nopeilla käyttöalueilla. Kytketyillä reluktanssimoottoreilla ei ole vain korkea hyötysuhde, vaan ne myös ylläpitävät korkeaa hyötysuhdetta laajalla nopeudensäätöalueella, mikä on vertaansa vailla muuntyyppisissä moottorikäyttöjärjestelmissä. Tämä suorituskyky soveltuu erittäin hyvin sähköajoneuvojen käyttöön ja on erittäin hyödyllinen sähköajoneuvojen ajomatkan parantamiseksi.
3. Johtopäätös
Tämän artikkelin painopiste on tuoda esille kytketyn reluktanssimoottorin etuja sähköajoneuvojen käyttömoottorina vertaamalla erilaisia yleisesti käytettyjä käyttömoottoreiden nopeudensäätöjärjestelmiä, jotka ovat sähköajoneuvojen kehittämisen tutkimuskohde. Tämäntyyppisissä erikoismoottoreissa on vielä paljon kehittämisen varaa käytännön sovelluksissa. Tutkijoiden on panostettava enemmän teoreettisen tutkimuksen tekemiseen, ja samalla on tarpeen yhdistää markkinoiden tarpeet edistämään tämäntyyppisten moottorien soveltamista käytännössä.
Postitusaika: 24.3.2022