Elektrisõidukid koosnevad peamiselt kolmest osast: mootorajam, akusüsteem ja sõiduki juhtimissüsteem. Mootori ajamisüsteem on osa, mis muundab elektrienergia otse mehaaniliseks energiaks, mis määrab elektrisõidukite jõudlusnäitajad. Seetõttu on ajami mootori valik eriti oluline.
Keskkonnakaitse keskkonnas on elektrisõidukid viimastel aastatel muutunud ka uurimistööks. Elektrisõidukid võivad linnaliikluses saavutada nulli või väga madalat heitkogust ning neil on keskkonnakaitse valdkonnas tohutuid eeliseid. Kõik riigid teevad kõvasti tööd elektrisõidukite arendamiseks. Elektrisõidukid koosnevad peamiselt kolmest osast: mootorajam, akusüsteem ja sõiduki juhtimissüsteem. Mootori ajamisüsteem on osa, mis muundab elektrienergia otse mehaaniliseks energiaks, mis määrab elektrisõidukite jõudlusnäitajad. Seetõttu on ajami mootori valik eriti oluline.
1. Ajamimootorite elektrisõidukitele esitatavad nõuded
Praegu võetakse elektrisõidukite jõudluse hindamisel peamiselt arvesse järgmist kolme jõudlusnäitajat:
(1) Maksimaalne läbisõit (km): elektrisõiduki maksimaalne läbisõit pärast aku täislaadimist;
(2) Kiirendusvõime(d): minimaalne aeg, mis kulub elektrisõiduki kiirendamiseks paigalt teatud kiiruseni;
(3) Maksimaalne kiirus (km/h): suurim kiirus, mille elektrisõiduk võib saavutada.
Elektrisõidukite sõiduomaduste jaoks mõeldud mootoritel on tööstuslike mootoritega võrreldes erilised jõudlusnõuded:
(1) Elektrisõiduki ajam nõuab tavaliselt kõrgeid dünaamilisi jõudlusnõudeid sagedase käivitamise/seiskamise, kiirendamise/aeglustuse ja pöördemomendi juhtimise jaoks;
(2) Kogu sõiduki massi vähendamiseks tühistatakse tavaliselt mitmekäiguline käigukast, mis eeldab, et mootor suudab madalal kiirusel või kallakule tõusmisel pakkuda suuremat pöördemomenti ja tavaliselt peab see vastu 4-5 korda. ülekoormus;
(3) Kiiruse reguleerimise vahemik peab olema võimalikult suur ja samal ajal on vaja säilitada kõrge tööefektiivsus kogu kiiruse reguleerimise vahemikus;
(4) Mootor on konstrueeritud nii, et sellel oleks võimalikult suur nimipöörlemissagedus ja samal ajal kasutatakse nii palju kui võimalik alumiiniumisulamist korpust. Kiire mootor on väikese suurusega, mis aitab vähendada elektrisõidukite kaalu;
(5) Elektrisõidukitel peaks olema optimaalne energiakasutus ja pidurdusenergia taaskasutamise funktsioon. Regeneratiivpidurdamisel taastuv energia peaks üldjuhul ulatuma 10–20%ni koguenergiast;
(6) Elektrisõidukites kasutatava mootori töökeskkond on keerulisem ja karmim, mis nõuab mootorilt head töökindlust ja keskkonnaga kohanemisvõimet ning samas peab tagama, et mootorite tootmiskulud ei saaks olla liiga kõrged.
2. Mitmed sagedamini kasutatavad ajamimootorid
2.1 DC mootor
Elektrisõidukite arendamise algfaasis kasutas enamik elektrisõidukeid ajamimootoritena alalisvoolumootoreid. Seda tüüpi mootoritehnoloogia on suhteliselt küps, lihtsate juhtimismeetodite ja suurepärase kiiruse reguleerimisega. Varem oli see kiiruse reguleerimise mootorite valdkonnas enim kasutatav. . Kuid alalisvoolumootori keeruka mehaanilise ehituse tõttu, nagu harjad ja mehaanilised kommutaatorid, on selle hetkeline ülekoormusvõime ja mootori pöörlemiskiiruse edasine tõus piiratud ning pikaajalise töö korral on piiratud ka mootori mehaaniline struktuur. mootor on Kaod tekib ja hoolduskulud suurenevad. Lisaks panevad harjadest tekkivad sädemed mootori töötamise ajal rootori kuumenema, raiskavad energiat, raskendavad soojuse hajumist ning põhjustavad ka kõrgsageduslikke elektromagnetilisi häireid, mis mõjutavad sõiduki jõudlust. Eeltoodud alalisvoolumootorite puuduste tõttu on praegused elektrisõidukid alalisvoolumootorid põhimõtteliselt kõrvaldanud.
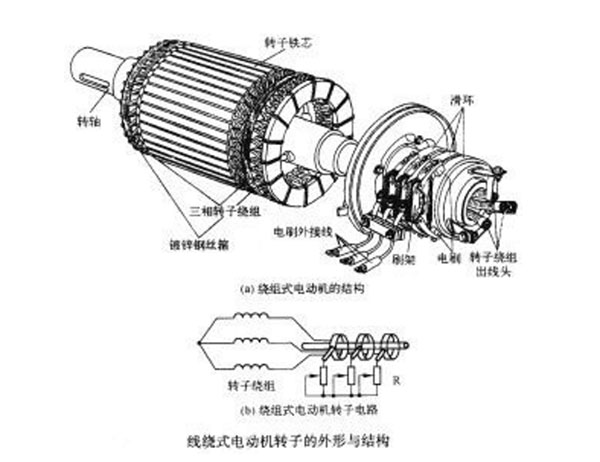
2,2 vahelduvvoolu asünkroonmootor
Vahelduvvoolu asünkroonmootor on tööstuses laialdaselt kasutatav mootoritüüp. Seda iseloomustab see, et staator ja rootor on lamineeritud räniterasest lehtedega. Mõlemad otsad on pakendatud alumiiniumkatetega. , usaldusväärne ja vastupidav töö, lihtne hooldus. Võrreldes sama võimsusega alalisvoolumootoriga on vahelduvvoolu asünkroonmootor tõhusam ja mass on umbes poole võrra väiksem. Kui kasutatakse vektorjuhtimise juhtimismeetodit, on võimalik saavutada alalisvoolumootoriga võrreldav juhitavus ja laiem kiiruse reguleerimise vahemik. Kõrge efektiivsuse, suure erivõimsuse ja kiireks tööks sobivuse eeliste tõttu on vahelduvvoolu asünkroonmootorid kõige laialdasemalt kasutatavad mootorid suure võimsusega elektrisõidukites. Praegu on vahelduvvoolu asünkroonmootoreid toodetud suures mahus ja valida on erinevat tüüpi küpsete toodete vahel. Suure kiirusega töötamise korral on aga mootori rootor tõsiselt kuumenenud ja mootorit tuleb töötamise ajal jahutada. Samal ajal on asünkroonmootori ajam ja juhtimissüsteem väga keeruline ning mootori korpuse maksumus on samuti kõrge. Võrreldes püsimagnetmootori ja reluktantsiga Mootorite puhul on asünkroonmootorite kasutegur ja võimsustihedus madal, mis ei soodusta elektrisõidukite maksimaalse läbisõidu parandamist.
2.3 Püsimagnetmootor
Püsimagnetmootorid võib staatori mähiste erinevate voolu lainekujude järgi jagada kahte tüüpi, üks on harjadeta alalisvoolumootor, millel on ristkülikukujuline impulsslaine vool; teine on püsimagnetiga sünkroonmootor, millel on siinuslaine vool. Mõlemat tüüpi mootorid on struktuurilt ja tööpõhimõttelt põhimõtteliselt samad. Rootorid on püsimagnetid, mis vähendab ergastusest tingitud kadu. Staator on paigaldatud mähistega, et tekitada vahelduvvoolu kaudu pöördemomenti, nii et jahutamine on suhteliselt lihtne. Kuna seda tüüpi mootoritele ei ole vaja paigaldada harju ja mehaanilist kommutatsioonistruktuuri, ei teki töötamise ajal kommutatsioonisädemeid, töö on ohutu ja usaldusväärne, hooldus on mugav ja energiakasutus on kõrge.
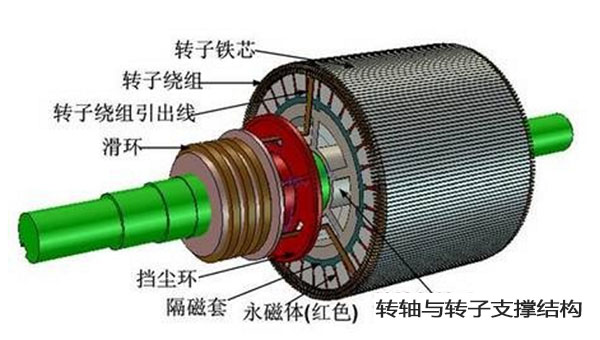
Püsimagnetmootori juhtimissüsteem on lihtsam kui vahelduvvoolu asünkroonmootori juhtimissüsteem. Püsimagnetmaterjalide protsessi piiratuse tõttu on aga püsimagnetmootori võimsusvahemik väike ja maksimaalne võimsus on üldiselt vaid kümneid miljoneid, mis on püsimagnetmootori suurim puudus. Samal ajal on rootori püsimagneti materjalil kõrge temperatuuri, vibratsiooni ja liigvoolu tingimustes magnetiline lagunemine, nii et suhteliselt keerulistes töötingimustes on püsimagneti mootor kalduvus kahjustada. Lisaks on püsimagnetmaterjalide hind kõrge, seega on kogu mootori ja selle juhtimissüsteemi maksumus kõrge.
2.4 Lülitatud reluktantsmootor
Uut tüüpi mootoritena on lülitatud reluktantsmootoril teiste ajamimootoritega võrreldes kõige lihtsam struktuur. Staator ja rootor on mõlemad kahekordsed silmapaistvad konstruktsioonid, mis on valmistatud tavalistest räniterasest lehtedest. Rootoril puudub struktuur. Staator on varustatud lihtsa kontsentreeritud mähisega, millel on palju eeliseid, nagu lihtne ja kindel struktuur, kõrge töökindlus, kerge kaal, madal hind, kõrge efektiivsus, madal temperatuuri tõus ja lihtne hooldus. Lisaks on sellel suurepärased alalisvoolu kiiruse reguleerimissüsteemi hea juhitavuse omadused ja see sobib karmides keskkondades ning sobib väga hästi kasutamiseks elektrisõidukite ajamimootorina.

Arvestades, et elektrisõidukite ajamiga mootoritel, alalisvoolumootoritel ja püsimagnetmootoritel on konstruktsiooni ja keeruka töökeskkonnaga halb kohanemisvõime ning need on altid mehaanilistele ja demagnetiseerimishäiretele, keskendub käesolev artikkel lülitatud reluktantsmootorite ja vahelduvvoolu asünkroonmootorite kasutuselevõtule. Võrreldes masinaga on sellel ilmsed eelised järgmistes aspektides.
2.4.1 Mootori kere struktuur
Lülitatud reluktantsmootori struktuur on lihtsam kui oravapuuriga asünkroonmootoril. Selle silmapaistev eelis on see, et rootoril puudub mähis ja see on valmistatud ainult tavalistest räniterasest lehtedest. Suurem osa kogu mootori kadudest on koondunud staatorimähisele, mis muudab mootori valmistamise lihtsaks, sellel on hea isolatsioon, seda on lihtne jahutada ja sellel on suurepärased soojuse hajumise omadused. See mootori struktuur võib vähendada mootori suurust ja kaalu ning seda on võimalik saada väikese mahuga. suurem väljundvõimsus. Mootori rootori hea mehaanilise elastsuse tõttu saab lülitatud reluktantsmootoreid kasutada ülikiire töö jaoks.
2.4.2 Mootori ajami ahel
Lülitatud reluktantsmootori ajamisüsteemi faasivool on ühesuunaline ja sellel pole pöördemomendi suunaga mingit pistmist ning mootori neljakvadrandilise tööoleku täitmiseks saab kasutada ainult ühte peamist lülitusseadet. Toitemuunduri ahel on otse ühendatud jadamisi mootori ergutusmähisega ja iga faasiahel annab toite iseseisvalt. Isegi kui teatud faasimähis või mootori kontroller ebaõnnestub, peab see ainult faasi töö peatama ilma suuremat mõju avaldamata. Seetõttu on nii mootori kere kui ka toitemuundur väga turvalised ja töökindlad, mistõttu sobivad need kasutamiseks karmides keskkondades paremini kui asünkroonsed masinad.
2.4.3 Mootorisüsteemi jõudlusaspektid
Lülitatud reluktantsmootoritel on palju juhtimisparameetreid ja elektrisõidukite neljakvadrandilise töö nõuete täitmine on asjakohaste juhtimisstrateegiate ja süsteemi disaini abil lihtne ning suudab säilitada suurepärast pidurdusvõimet suure kiirusega tööpiirkondades. Lülitatud reluktantsmootoritel pole mitte ainult kõrge kasutegur, vaid need säilitavad ka suure tõhususe laias kiiruse reguleerimise vahemikus, mis on võrreldamatu muud tüüpi mootoriajamisüsteemidega. See jõudlus sobib väga hästi elektrisõidukite kasutamiseks ja on väga kasulik elektrisõidukite sõiduulatuse parandamiseks.
3. Järeldus
Käesoleva töö eesmärk on tuua esile lülitatud reluktantsmootori eelised elektrisõidukite ajamimootorina, võrreldes erinevaid sagedamini kasutatavaid veomootori kiiruse reguleerimise süsteeme, mis on elektrisõidukite arendamisel uurimistöö koht. Seda tüüpi erimootorite puhul on praktilistes rakendustes veel palju arenguruumi. Teadlased peavad tegema rohkem jõupingutusi teoreetiliste uuringute läbiviimiseks ja samal ajal on vaja ühendada turu vajadused, et edendada seda tüüpi mootorite rakendamist praktikas.
Postitusaeg: 24. märts 2022