Miniatur-Stromgetriebemotor der PX-Serie
Überblick
Die Miniatur-Gleichstromgetriebemotoren der Serie J-SZ(ZYT)-PX bestehen jeweils aus Gleichstrommotoren der Serie SZ(ZYT) und gewöhnlichen Präzisions-Planetengetrieben vom Typ PX und sind mit einem Netzteil ausgestattet, das eine stufenlose Drehzahlregelung ermöglichen kann. Großer Einstellbereich, geringe Größe, geringes Gewicht, hoher Wirkungsgrad, kompakte Struktur, großes Ausgangsdrehmoment, weit verbreitet in Antrieben, die eine niedrige Drehzahl, ein hohes Drehmoment und eine stufenlose Drehzahlregelung erfordern. Stufenlos regelbare Geschwindigkeit.
Planetengetriebe der PX-Serie können direkt an Wechselstrommotoren, Schrittmotoren und andere Motoren angeschlossen werden.
Die PX-Serie kann auch direkt an Schneckengetriebe und Zykloiden-Windradgetriebe angeschlossen werden, um Untersetzungsgetriebe mit unterschiedlichen oder großen Drehzahlverhältnissen zu bilden.
Anleitung zum Reduziermodell
Motormodell
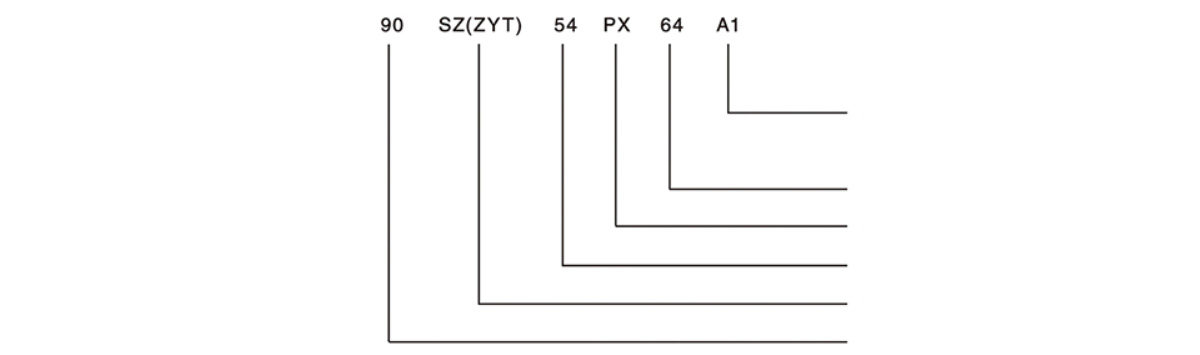
A1-Installationsform: A1 ist Fußinstallation, A3 ist Flanschinstallation, B5 ist Rundflanschinstallation
64 -Untersetzungsverhältnis: 1:64
PX – Gewöhnliches Präzisions-Planetengetriebe
54 – Motorleistungsparametercode
SZ(ZYT) – DC-Servomotor (Permanentmagnet-DC-Motor)
90 – Motorbasisnummer: Gibt den Außendurchmesser von 90 mm an
Reduziermodell
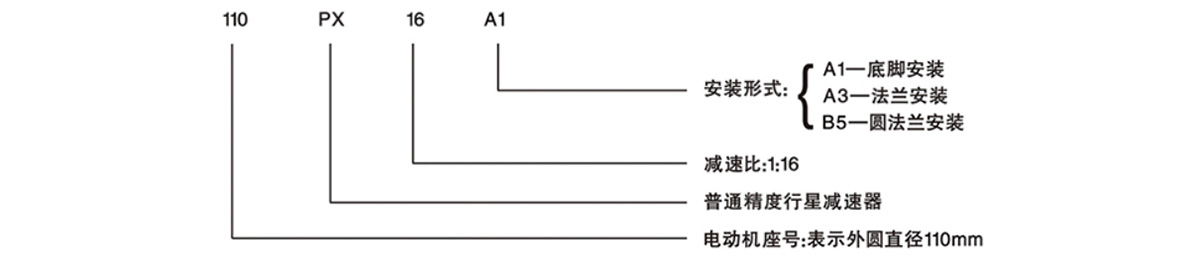
A1-Installationsform: A1 ist Fußinstallation, A3 ist Flanschinstallation, B5 ist Rundflanschinstallation
16 - Untersetzungsverhältnis: 1:64
PX – Gewöhnliches Präzisions-Planetengetriebe
110 – Motorbasisnummer: Gibt den Außendurchmesser von 90 mm an
Die technischen Daten des Elektromotors
| Geschwindigkeit (U/min) | Drehmoment (mN.m) | Modell | Leistung | Nenngeschwindigkeit (U/min) | Installieren | Nennspannung | Verhältnis reduzieren | Bemerkungen | |
| 750 | 260 | 55ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187,5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660 | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187,5 | 1270 | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187,5 | 1780 | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
Allgemeines Geschwindigkeitsverhältnis der PS-Serie
Stufe 1: 4, 6
Sekundarstufe: 16, 24, 36
Stufe 3: 64, 96, 144, 216
Ebene 4: 2563845768641296
Nicht standardmäßiges Geschwindigkeitsverhältnis der 90PX-Serie
Stufe 1: 3
Stufe 2: 9, 12, 18
Stufe 3: 27, 48, 54, 72, 108
Stufe 4: 81, 162, 192, 288, 324, 432, 648
Nicht standardmäßiges Geschwindigkeitsverhältnis der 110PX-Serie
Stufe 1: 5
Stufe 2: 20, 25, 30
Stufe 3: 80, 100, 120, 125, 150, 180
Stufe 4: 320, 400, 480, 500, 600, 625, 720, 750, 900, 1080
Es können nicht standardmäßige Untersetzungsgetriebe wie spezielle Geschwindigkeitsverhältnisse, Geschwindigkeiten, Einbaugrößen usw. entworfen werden
Auswahlbeispiel
Der Benutzer kann die Leistung und das Modell des Untersetzungsgetriebes entsprechend dem tatsächlichen Arbeitssystem und der Art der Last richtig auswählen, indem er sich auf die folgenden Inhalte bezieht.
1.Abhängig vom Lastdrehmoment und der Ausgangsdrehzahl des Untersetzungsgetriebes kann die erforderliche Leistung nach folgender Formel berechnet werden: P=T n/kh
Wählen Sie in der Formel: P – Ausgangsleistung WT – Lastdrehmoment Nm n – Ausgangsdrehzahl U/min gemäß dem technischen Datenblatt
K-Lastkonstante 9560 η – Übertragungseffizienz, ausgewählt aus der folgenden Tabelle
Übertragungsverhältnis
| Übersetzungsverhältnis(i) | 4(6) | 16(36) | 64(216) | 256(1296) |
| η | 0,76 | 0,72 | 0,68 | 0,65 |
2.Der Motorregler kann so gewählt werden, dass er die stufenlose Geschwindigkeitsänderung des Untersetzungsgetriebes von O auf die Nenngeschwindigkeit realisiert.
3. Entsprechend dem tatsächlichen Arbeitssystem und der Art der Last kann der Betriebskoeffizient unter Bezugnahme auf die Betriebskoeffiziententabelle ausgewählt werden. Nach der Berechnung kann die erforderliche Leistung des Untersetzungsgetriebes ermittelt und entsprechend der erforderlichen Ausgangsgeschwindigkeit das Untersetzungsgetriebemodell anhand der Tabelle mit den technischen Daten ausgewählt werden.
Arbeitsindexblatt
| Tägliche Arbeitszeit | Laststufe | |||
| Durchschnittlich stabil | Mittlere Lebendigkeit | Starke Auswirkungen | ||
| 12 | 1 | 1,25 | 1,75 | |
| 24 | 1,25 | 1,50 | 2 | |
Beispiel: Wenn die Last gleichmäßig und stabil ist, die erforderliche Motornennleistung 40 W beträgt, die Nennspannung 110 V beträgt, das Ausgangsgeschwindigkeitsverhältnis 4 beträgt und die Arbeitszeit pro Tag 12 Stunden beträgt, werden 40 W ausgewählt. Wenn es sich bei der Last um mäßige Vibrationen handelt:
Dann: a. Sehen Sie in der Service-Koeffizienten-Tabelle nach, um die Service-Reihe als 1,25 auszuwählen. Erforderliche Leistung W=40W*1,25=50W
B. Sehen Sie sich das technische Datenblatt für optionales J70SZ54P*4 an
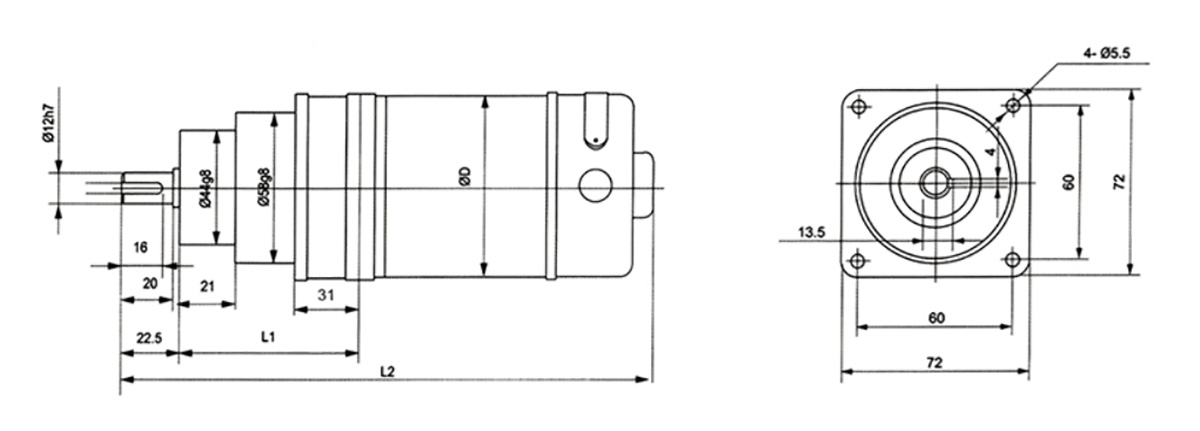
70PX-Frontflansch
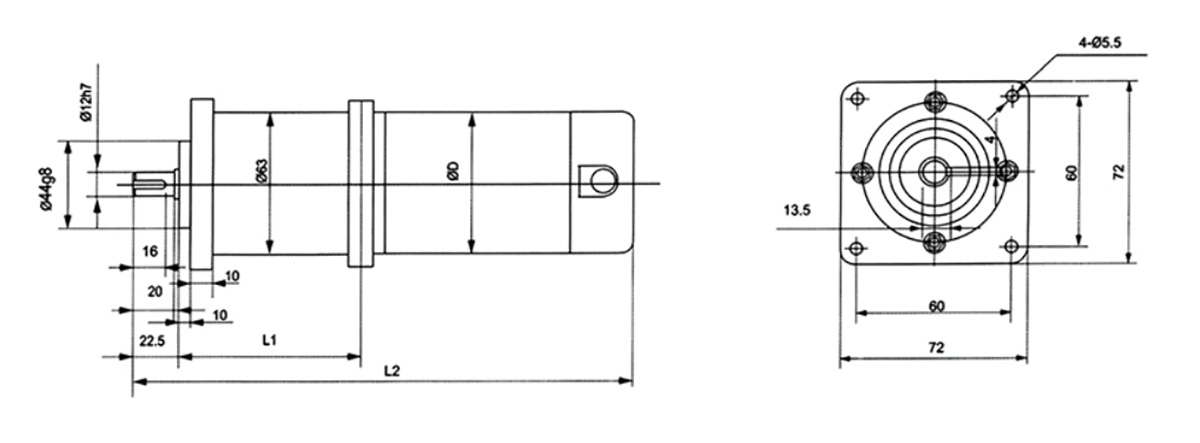
70PX-Hinterflansch