- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu




køkkenkok madlavningsrobot kogemaskine skiftet modviljemotor
Motorparametre
| Driftsspænding | DC300V |
| Nominel strøm | 2,8±10%A |
| Maksimal strøm | 5,4A |
| Startspænding | DC23V~25V |
| nominel effekt | 700±10 vægtprocent |
| Nominel hastighed | 35000±10% RPM |
| Tomgangsstrøm | <100W |
| antal pæle | 2 |
| drejningsmoment | 0,2NM |
| effektivitet | 80 %±10 % |
| kommutering | Aksial CW |
| støj | 96dB MAX, <30cm |
| vægt | 1,68 kg |
| leje | 2 kuglelejer |
| kontrollere | Hall sensor |
| Installere | flangemontering |
Motorisk struktur
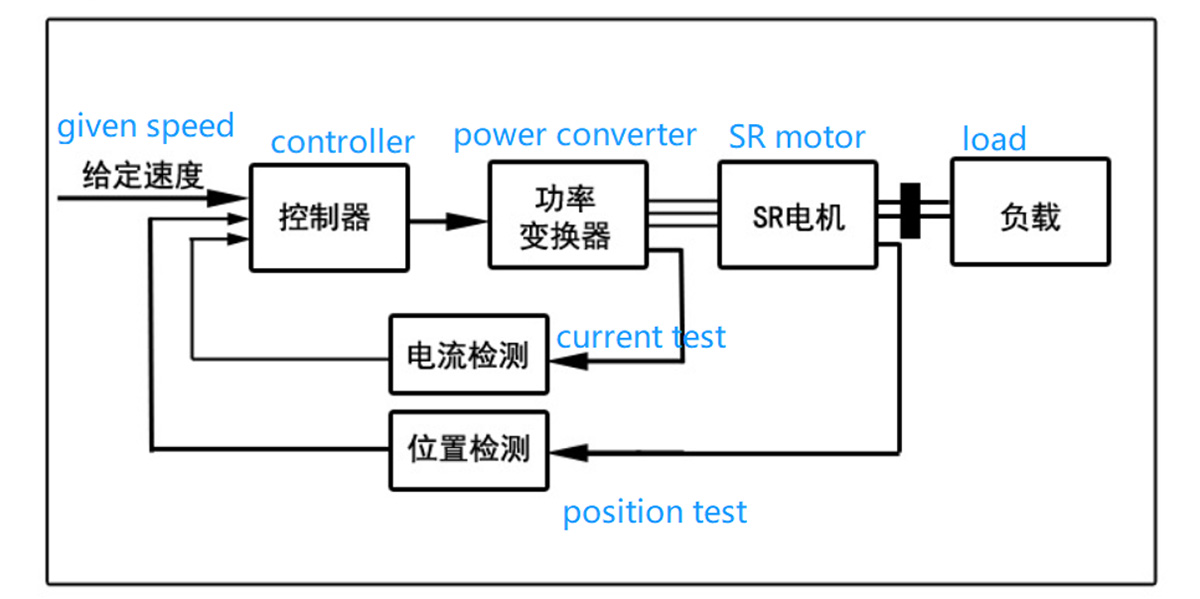
1. Sammensætningen af det koblede reluktansmotordrevsystem
Switched reluktansmotordrivsystem (SRD) består hovedsageligt af switchet reluktansmotor, strømomformer, controller og detektor.
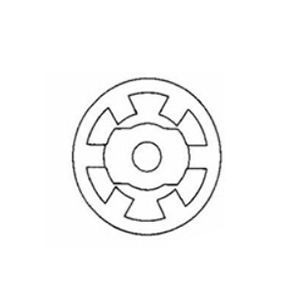
2.Skiftet reluktansmotor
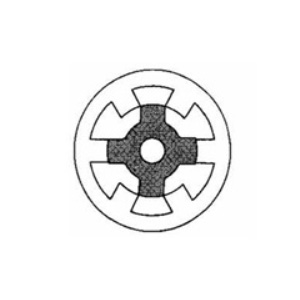
SR-motorer kan designes i enkeltfasede, tofasede, trefasede, firefasede og flerfasede strukturer med forskellige fasenumre, og der er enkelttandsstruktur pr. pol og flertandsstruktur pr. pol, aksial luft spalte, radial luftspalte og aksial luftspalte. En radial hybrid luftspaltestruktur, indre rotor og ydre rotorstruktur, SR-motorer under trefasede har generelt ikke selvstartsevne. Et stort antal faser er gavnligt for at reducere drejningsmomentudsving, men det fører til kompleks struktur, mange hovedafbryderenheder og øgede omkostninger. På nuværende tidspunkt er den tofasede 6/4-polede struktur og den firefasede 8/6-niveaustruktur meget udbredt.
Almindelig struktur 3-faset
6/4 polar SR motor
3-faset 6/2
polar SR motor
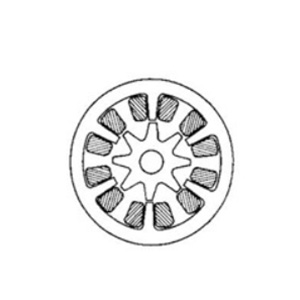
3-faset 6/8
polar SR motor

3-faset 12/8
polar SR motor
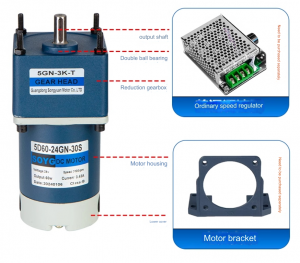
3. Fysisk ledningsdiagram af motor og driver
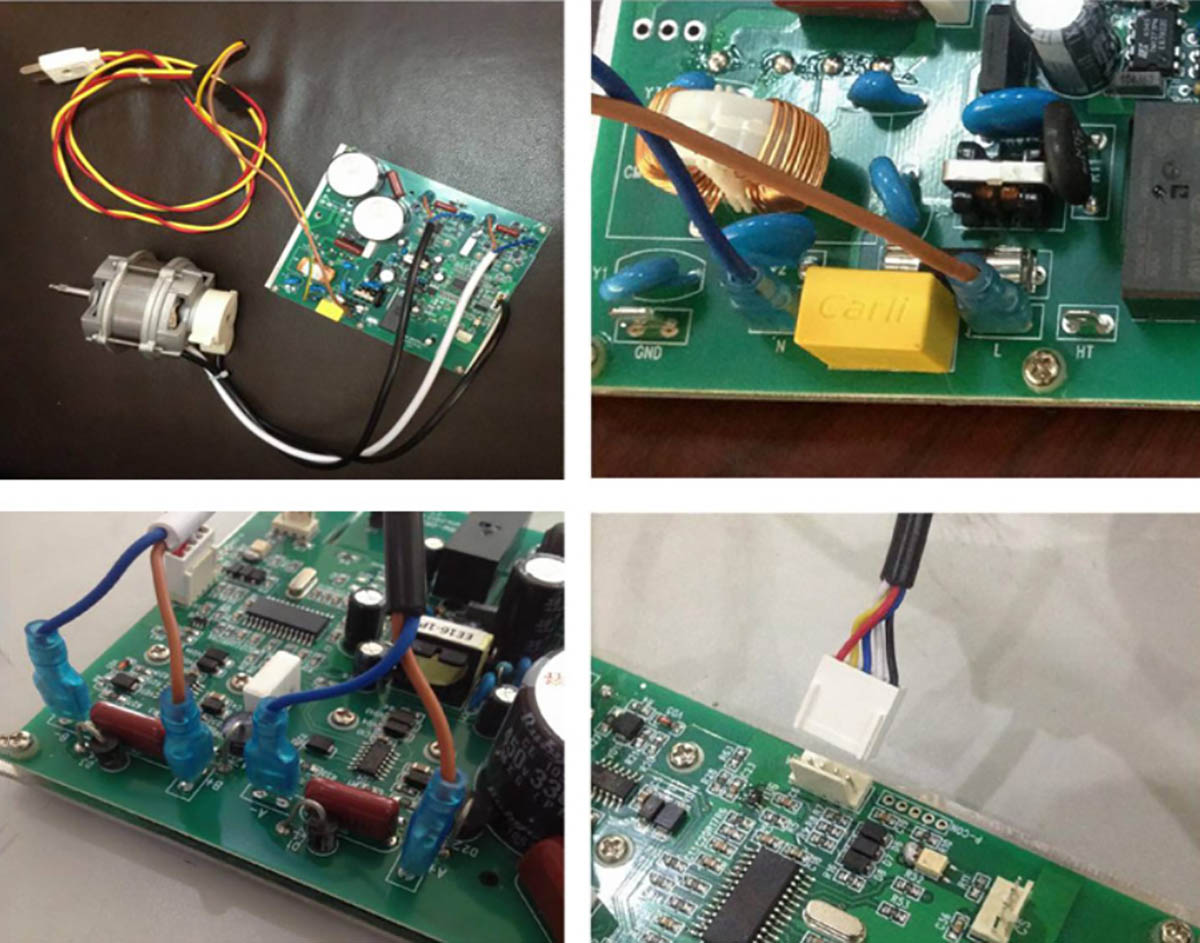
Produktfoto


Motorfaseledninger
Sort (Brun /A+ Blå /A-), Hvid (Brun /A+ Blå /A-), ledningslængde L=380 ± 50 mm
Hall ledningsføring:
Rød ( +5V ), sort ( GND), gul ( SA ), blå ( SB), hvid ( SC ), linjelængde L= linjelængde L=380 ± 50 mm
Opbevaring: 5 ℃ ~40 ℃, luftfugtighed <90 %
Isoleringsklasse: F
Revnefri spole drejer i 3 minutter ved 130 % af nominel spænding.
Arbejdstid: 2000 timer under normale arbejdsforhold.
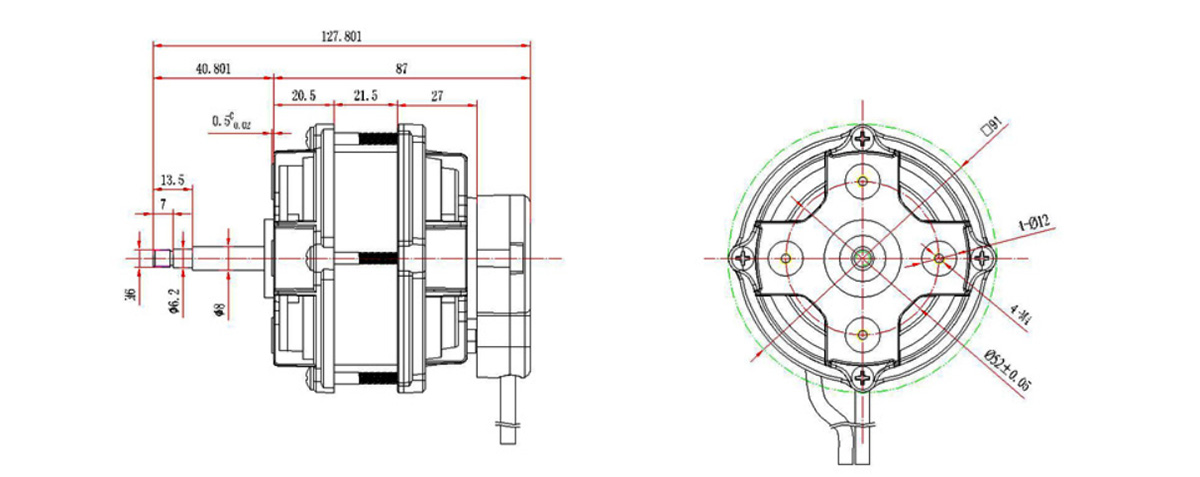
Den aksiale forskydning skal være mindre end 0,02 mm, når motoren kører.
Motoregenskaber
1.Høj systemeffektivitet: I det brede hastighedsreguleringsområde er den samlede effektivitet mindst 10 % højere end andre hastighedsreguleringssystemer, og den høje effektivitet er mere tydelig ved lav hastighed og ikke-nominel belastning.
2.Bredt udvalg af hastighedsregulering, langvarig drift ved lav hastighed: Den kan køre under belastning i lang tid i området fra nul til maksimal hastighed, og temperaturstigningen på motoren og controlleren er lavere end den for den nominelle belastning.
3.Højt startmoment, lav startstrøm: Når startmomentet når 150 % af det nominelle moment, er startstrømmen kun 30 % af mærkestrømmen.
4. Den kan starte og stoppe hyppigt og skifte mellem fremad- og baglæns rotation: den kan starte og stoppe hyppigt, og skifte mellem fremad- og baglæns rotation ofte. Når der er en bremseenhed, og bremsekraften opfylder tidskravet, kan start-stop og frem-tilbage-omkobling nå op på mere end 1.000 gange i timen.
5. Stærk overbelastningskapacitet: Når belastningen er meget større end den nominelle belastning i kort tid, vil hastigheden falde, den maksimale udgangseffekt opretholdes, og der vil ikke være noget overstrømsfænomen. Når belastningen vender tilbage til normal, vender hastigheden tilbage til den indstillede hastighed.
6.Mekanisk styrke og pålidelighed er højere end andre typer motorer. Rotoren har ingen permanente magneter og kan have en højere tilladt temperaturstigning.
Anvendelse
Ventilator og kogemaskine