Els vehicles elèctrics es componen principalment de tres parts: sistema d'accionament del motor, sistema de bateries i sistema de control del vehicle. El sistema d'accionament del motor és la part que converteix directament l'energia elèctrica en energia mecànica, que determina els indicadors de rendiment dels vehicles elèctrics. Per tant, la selecció del motor d'accionament és especialment important.
En l'entorn de la protecció del medi ambient, els vehicles elèctrics també s'han convertit en un punt d'investigació en els últims anys. Els vehicles elèctrics poden aconseguir zero o molt baixes emissions en el trànsit urbà, i tenen enormes avantatges en l'àmbit de la protecció del medi ambient. Tots els països estan treballant dur per desenvolupar vehicles elèctrics. Els vehicles elèctrics es componen principalment de tres parts: sistema d'accionament del motor, sistema de bateries i sistema de control del vehicle. El sistema d'accionament del motor és la part que converteix directament l'energia elèctrica en energia mecànica, que determina els indicadors de rendiment dels vehicles elèctrics. Per tant, la selecció del motor d'accionament és especialment important.
1. Requisits dels vehicles elèctrics per a motors de tracció
Actualment, l'avaluació del rendiment del vehicle elèctric té en compte principalment els tres indicadors de rendiment següents:
(1) Kilometratge màxim (km): el quilometratge màxim del vehicle elèctric després que la bateria estigui completament carregada;
(2) Capacitat (s) d'acceleració: el temps mínim necessari perquè un vehicle elèctric acceleri des d'una parada fins a una determinada velocitat;
(3) Velocitat màxima (km/h): velocitat màxima que pot assolir un vehicle elèctric.
Els motors dissenyats per a les característiques de conducció de vehicles elèctrics tenen requisits de rendiment especials en comparació amb els motors industrials:
(1) El motor d'accionament del vehicle elèctric sol requerir un alt rendiment dinàmic per a l'arrencada/parada freqüent, l'acceleració/desacceleració i el control del parell;
(2) Per tal de reduir el pes de tot el vehicle, la transmissió de diverses velocitats sol ser cancel·lada, la qual cosa requereix que el motor pugui proporcionar un parell més alt a baixa velocitat o quan s'enfila un pendent, i normalment pot suportar 4-5 vegades. la sobrecàrrega;
(3) El rang de regulació de velocitat ha de ser el més gran possible i, al mateix temps, cal mantenir una alta eficiència operativa dins de tot el rang de regulació de velocitat;
(4) El motor està dissenyat per tenir una velocitat nominal alta tant com sigui possible i, al mateix temps, s'utilitza una carcassa d'aliatge d'alumini tant com sigui possible. El motor d'alta velocitat és de mida petita, cosa que ajuda a reduir el pes dels vehicles elèctrics;
(5) Els vehicles elèctrics han de tenir una utilització òptima de l'energia i tenir la funció de recuperar l'energia de frenada. L'energia recuperada per la frenada regenerativa hauria d'arribar, en general, al 10%-20% de l'energia total;
(6) L'entorn de treball del motor utilitzat en els vehicles elèctrics és més complex i dur, i requereix que el motor tingui una bona fiabilitat i adaptabilitat ambiental i, al mateix temps, garanteixi que el cost de producció del motor no sigui massa elevat.
2. Diversos motors d'accionament d'ús habitual
2.1 Motor de corrent continu
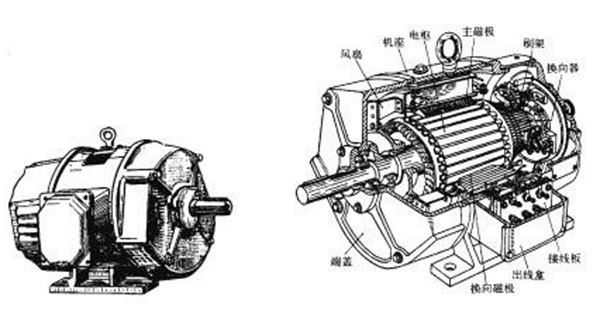
En les primeres fases del desenvolupament dels vehicles elèctrics, la majoria dels vehicles elèctrics utilitzaven motors de corrent continu com a motors d'accionament. Aquest tipus de tecnologia de motor és relativament madura, amb mètodes de control fàcils i una regulació de velocitat excel·lent. Abans era el més utilitzat en el camp dels motors de regulació de velocitat. . Tanmateix, a causa de la complexa estructura mecànica del motor de corrent continu, com ara: escombretes i commutadors mecànics, la seva capacitat de sobrecàrrega instantània i l'augment de la velocitat del motor són limitades, i en el cas de treballs a llarg termini, l'estructura mecànica de el motor es genera pèrdues i s'incrementen els costos de manteniment. A més, quan el motor està en marxa, les espurnes dels raspalls fan que el rotor s'escalfi, malgasti energia, dificulta la dissipació de la calor i també provoquen interferències electromagnètiques d'alta freqüència, que afecten el rendiment del vehicle. A causa de les deficiències anteriors dels motors de corrent continu, els vehicles elèctrics actuals bàsicament han eliminat els motors de corrent continu.
2.2 Motor asíncron de CA
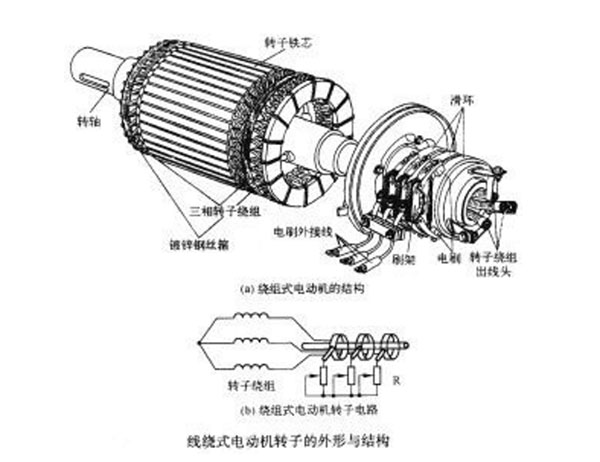
El motor asíncron de CA és un tipus de motor que s'utilitza àmpliament a la indústria. Es caracteritza perquè l'estator i el rotor estan laminats per làmines d'acer al silici. Els dos extrems estan empaquetats amb cobertes d'alumini. , funcionament fiable i durador, fàcil manteniment. En comparació amb el motor de corrent continu de la mateixa potència, el motor asíncron de CA és més eficient i la massa és aproximadament la meitat més lleugera. Si s'adopta el mètode de control de control vectorial, es pot obtenir la controlabilitat i el rang de regulació de velocitat més ampli comparable al del motor de corrent continu. A causa dels avantatges d'alta eficiència, alta potència específica i aptitud per a un funcionament a alta velocitat, els motors asíncrons de CA són els motors més utilitzats en vehicles elèctrics d'alta potència. Actualment, els motors asíncrons de CA s'han produït a gran escala i hi ha diversos tipus de productes madurs per triar. Tanmateix, en el cas de l'operació a alta velocitat, el rotor del motor s'escalfa seriosament i el motor s'ha de refredar durant el funcionament. Al mateix temps, el sistema d'accionament i control del motor asíncron és molt complicat i el cost del cos del motor també és elevat. En comparació amb el motor d'imant permanent i la reticència commutada Per als motors, l'eficiència i la densitat de potència dels motors asíncrons són baixes, cosa que no afavoreix la millora del quilometratge màxim dels vehicles elèctrics.
2.3 Motor d'imant permanent
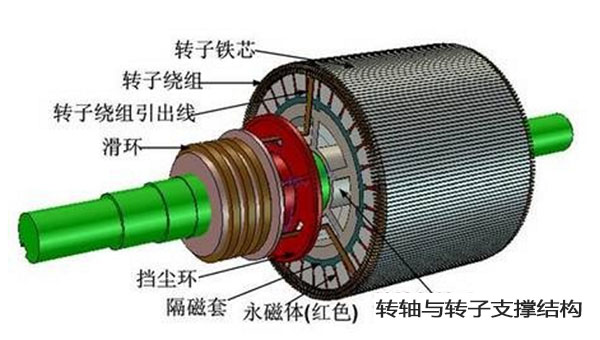
Els motors d'imants permanents es poden dividir en dos tipus segons les diferents formes d'ona de corrent dels bobinatges de l'estator, un és un motor de corrent continu sense escombretes, que té un corrent d'ona de pols rectangular; l'altre és un motor síncron d'imant permanent, que té un corrent d'ona sinusoïdal. Els dos tipus de motors són bàsicament els mateixos en estructura i principi de funcionament. Els rotors són imants permanents, la qual cosa redueix la pèrdua causada per l'excitació. L'estator s'instal·la amb bobinatges per generar parell mitjançant corrent altern, de manera que el refredament és relativament fàcil. Com que aquest tipus de motor no necessita instal·lar escombretes i estructura de commutació mecànica, no es generaran espurnes de commutació durant el funcionament, el funcionament és segur i fiable, el manteniment és convenient i la taxa d'utilització d'energia és alta.
El sistema de control del motor d'imant permanent és més senzill que el sistema de control del motor asíncron de CA. Tanmateix, a causa de la limitació del procés de material d'imant permanent, el rang de potència del motor d'imant permanent és petit i la potència màxima és generalment de només desenes de milions, que és el major desavantatge del motor d'imant permanent. Al mateix temps, el material d'imant permanent del rotor tindrà un fenomen de decadència magnètica en condicions d'alta temperatura, vibració i sobreintensitat, de manera que en condicions de treball relativament complexes, el motor d'imant permanent és propens a danys. A més, el preu dels materials d'imant permanent és elevat, de manera que el cost de tot el motor i el seu sistema de control és elevat.
2.4 Motor de reluctància commutada
Com a nou tipus de motor, el motor de reluctància commutada té l'estructura més senzilla en comparació amb altres tipus de motors d'accionament. L'estator i el rotor són estructures dobles sortints fetes de làmines d'acer de silici normals. No hi ha cap estructura al rotor. L'estator està equipat amb un bobinatge concentrat senzill, que té molts avantatges com ara una estructura senzilla i sòlida, alta fiabilitat, pes lleuger, baix cost, alta eficiència, baixa temperatura i fàcil manteniment. A més, té les excel·lents característiques d'una bona controlabilitat del sistema de control de velocitat de CC, és adequat per a entorns durs i és molt adequat per al seu ús com a motor d'accionament per a vehicles elèctrics.

Tenint en compte que, com que els motors d'accionament de vehicles elèctrics, els motors de corrent continu i els motors d'imants permanents tenen poca adaptabilitat a l'estructura i un entorn de treball complex, i són propensos a fallades mecàniques i de desmagnetització, aquest article se centra en la introducció de motors de reluctància commutada i motors asíncrons de CA. En comparació amb la màquina, té avantatges evidents en els aspectes següents.
2.4.1 L'estructura del cos motor
L'estructura del motor de reluctància commutada és més senzilla que la del motor d'inducció de gàbia d'esquirol. El seu avantatge destacat és que no hi ha bobinatge al rotor i només està fet de làmines d'acer de silici normals. La major part de la pèrdua de tot el motor es concentra en el bobinatge de l'estator, cosa que fa que el motor sigui senzill de fabricar, té un bon aïllament, és fàcil de refredar i té excel·lents característiques de dissipació de calor. Aquesta estructura del motor pot reduir la mida i el pes del motor, i es pot obtenir amb un petit volum. potència de sortida més gran. A causa de la bona elasticitat mecànica del rotor del motor, es poden utilitzar motors de reluctància commutada per a un funcionament d'alta velocitat.
2.4.2 Circuit d'accionament del motor
El corrent de fase del sistema d'accionament del motor de reluctància commutada és unidireccional i no té res a veure amb la direcció del parell, i només es pot utilitzar un dispositiu de commutació principal per complir l'estat de funcionament de quatre quadrants del motor. El circuit del convertidor de potència està connectat directament en sèrie amb el bobinatge d'excitació del motor, i cada circuit de fase subministra energia de manera independent. Fins i tot si falla un determinat bobinatge de fase o el controlador del motor, només cal aturar el funcionament de la fase sense causar un impacte més gran. Per tant, tant el cos del motor com el convertidor de potència són molt segurs i fiables, de manera que són més adequats per al seu ús en entorns durs que les màquines asíncrones.
2.4.3 Aspectes de rendiment del sistema motor
Els motors de reluctància commutada tenen molts paràmetres de control, i és fàcil complir els requisits de funcionament de quatre quadrants de vehicles elèctrics mitjançant estratègies de control i disseny de sistemes adequats, i poden mantenir una excel·lent capacitat de frenada a les zones d'operació d'alta velocitat. Els motors de reluctància commutada no només tenen una alta eficiència, sinó que també mantenen una alta eficiència en un ampli rang de regulació de velocitat, que no té comparació amb altres tipus de sistemes d'accionament del motor. Aquest rendiment és molt adequat per al funcionament de vehicles elèctrics, i és molt beneficiós per millorar l'autonomia de creuer dels vehicles elèctrics.
3. Conclusió
L'objectiu d'aquest document és exposar els avantatges del motor de reluctància commutada com a motor d'accionament per a vehicles elèctrics comparant diversos sistemes de control de velocitat del motor d'accionament d'ús habitual, que és un punt d'investigació en el desenvolupament de vehicles elèctrics. Per a aquest tipus de motor especial, encara hi ha molt marge de desenvolupament en aplicacions pràctiques. Els investigadors han de fer més esforços per dur a terme investigacions teòriques i, al mateix temps, cal combinar les necessitats del mercat per afavorir l'aplicació d'aquest tipus de motor a la pràctica.
Hora de publicació: 24-mar-2022