



кухонны шэф-повар кулінарны робат кулінарная машына з пераключаным рухавіком неахвоты
Параметры рухавіка
| Працоўнае напружанне | 300В пастаяннага току |
| Намінальны ток | 2,8±10%А |
| Максімальны ток | 5,4А |
| Пускавое напружанне | DC23V~25V |
| намінальная магутнасць | 700±10% Вт |
| Намінальная хуткасць | 35000±10% абаротаў у хвіліну |
| Халастое харчаванне | <100 Вт |
| колькасць полюсаў | 2 |
| крутоўны момант | 0,2 марскіх міль |
| эфектыўнасць | 80%±10% |
| камутацыя | Восевая CW |
| шум | 96 дБ МАКС., <30 см |
| вага | 1,68 кг |
| падшыпнік | 2 шарыкавыя падшыпнікі |
| кантроль | Датчык хола |
| Усталяваць | фланцавае мацаванне |
Рухальная будова
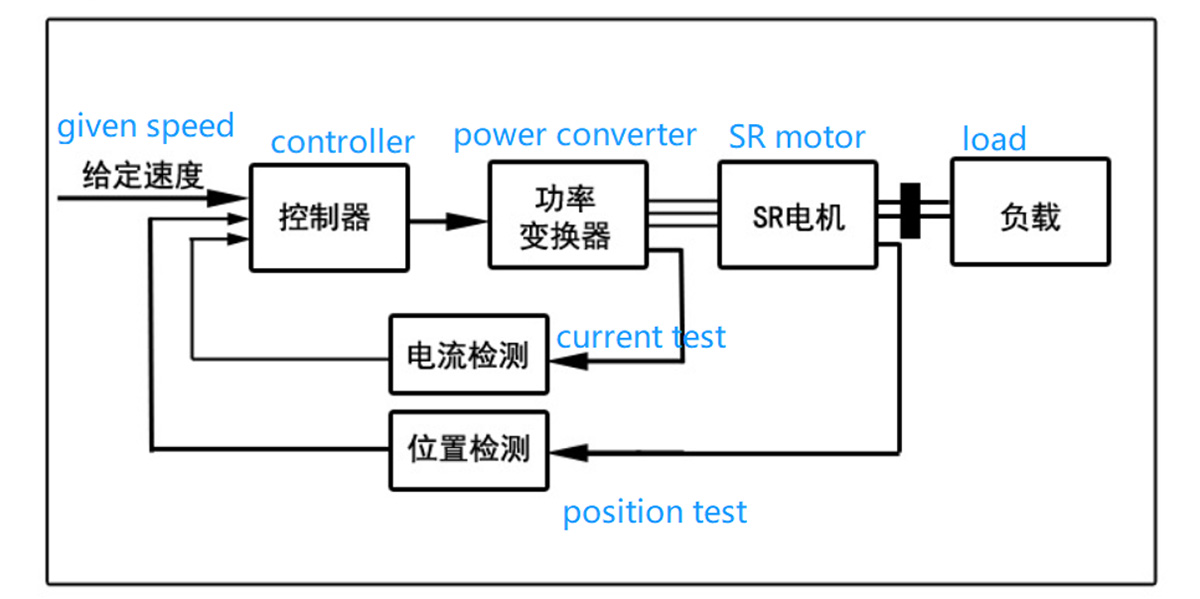
1. Састаў сістэмы прывада рэактыўных рухавікоў
Сістэма прывада з рэактыўным рухавіком (SRD) у асноўным складаецца з рэактыўнага рухавіка, пераўтваральніка магутнасці, кантролера і дэтэктара.
2.Рэактыўны рухавік
Рухавікі SR могуць быць спраектаваны ў аднафазныя, двухфазныя, трохфазныя, чатырохфазныя і шматфазныя структуры з розным лікам фаз, і ёсць адназубчатая структура на полюс і шматзубчатая структура на полюс, восевая паветраная зазор, радыяльны паветраны зазор і восевы паветраны зазор. Радыяльна-гібрыдная структура з паветраным зазорам, унутраны і знешні ротары, рухавікі SR менш трохфазнага тыпу звычайна не маюць магчымасці самастойнага запуску. Вялікая колькасць фаз спрыяе памяншэнню ваганняў крутоўнага моманту, але гэта прыводзіць да складанай структуры, вялікай колькасці асноўных камутацыйных прылад і павелічэння кошту. У цяперашні час шырока выкарыстоўваюцца двухфазная 6/4-полюсная структура і чатырохфазная 8/6-узроўневая структура.
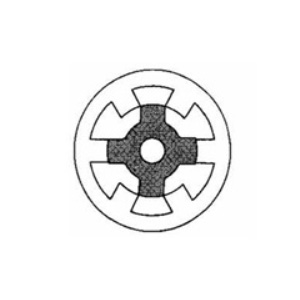
Звычайная структура, 3 фазы
6/4 палярны рухавік SR
3-фазны 6/2
палярны рухавік SR
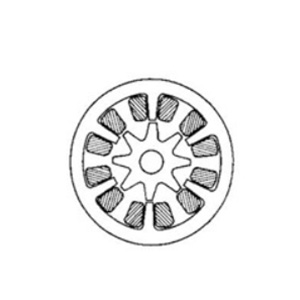
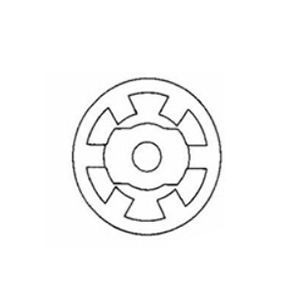
3-фазны 6/8
палярны рухавік SR

3-фазны 12/8
палярны рухавік SR
3. Фізічная схема падключэння рухавіка і драйвера
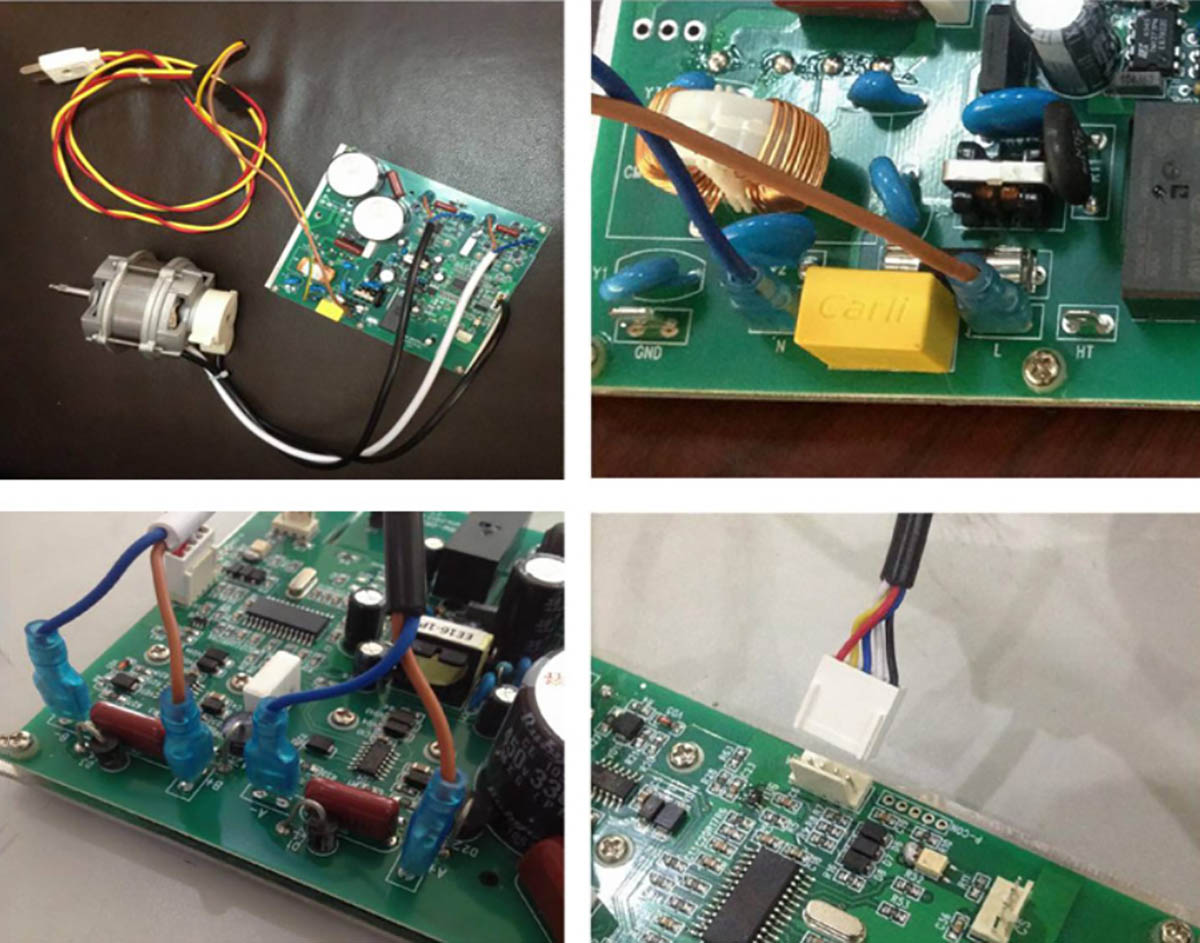
Фота прадукту


Праводка фаз рухавіка
Чорны (карычневы /A+ сіні /A-), белы (карычневы /A+ сіні /A-), даўжыня дроту L=380 ± 50 мм
Разводка правадоў хола:
Чырвоны (+5 В), чорны (GND), жоўты (SA), сіні (SB), белы (SC), даўжыня лініі L = даўжыня лініі L = 380 ± 50 мм
Захоўванне: 5 ℃ ~40 ℃, вільготнасць <90%
Клас ізаляцыі: F
Шпулька без расколін круціцца 3 хвіліны пры 130% намінальнага напружання.
Тэрмін працы: 2000 гадзін пры нармальных умовах працы.
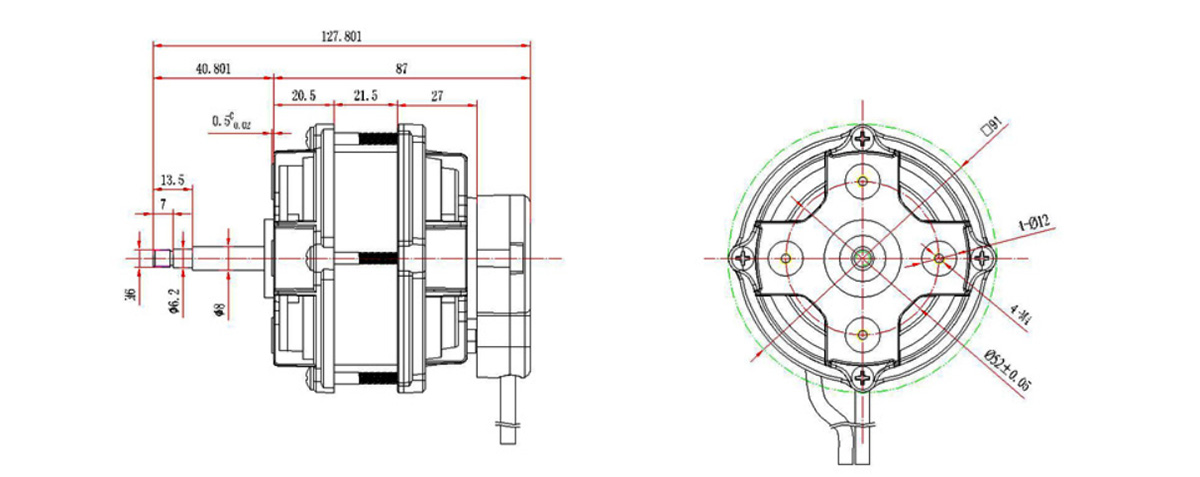
Восевае зрушэнне павінна быць менш за 0,02 мм, калі рухавік працуе.
Рухальныя характарыстыкі
1.Высокая эфектыўнасць сістэмы: у шырокім дыяпазоне рэгулявання хуткасці агульная эфектыўнасць як мінімум на 10% вышэй, чым у іншых сістэм рэгулявання хуткасці, і высокая эфектыўнасць больш відавочная пры нізкай хуткасці і ненамінальнай нагрузцы.
2.Шырокі дыяпазон рэгулявання хуткасці, працяглая праца на нізкай хуткасці: ён можа працаваць пад нагрузкай на працягу доўгага часу ў дыяпазоне ад нуля да максімальнай хуткасці, а павышэнне тэмпературы рухавіка і кантролера ніжэй, чым пры намінальнай нагрузцы.
3.Высокі пускавы момант, нізкі пускавы ток: калі пускавы момант дасягае 150% ад намінальнага крутоўнага моманту, пускавы ток складае толькі 30% ад намінальнага току.
4. Ён можа часта запускацца і спыняцца, а таксама пераключацца паміж кручэннем наперад і назад: ён можа часта запускацца і спыняцца, а таксама часта пераключацца паміж кручэннем наперад і назад. Калі ёсць тармазны блок і магутнасць тармажэння адпавядае патрабаванням часу, пераключэнне пуск-стоп і наперад-назад можа дасягаць больш за 1000 разоў у гадзіну.
5. Моцная здольнасць да перагрузкі: калі нагрузка значна перавышае намінальную на працягу кароткага часу, хуткасць будзе падаць, максімальная выхадная магутнасць будзе падтрымлівацца, і не будзе з'явы перагрузкі па току. Калі нагрузка прыходзіць у норму, хуткасць вяртаецца да зададзенай.
6.Механічная трываласць і надзейнасць вышэй, чым у іншых відаў матораў. Ротар не мае пастаянных магнітаў і можа мець больш высокі дапушчальны рост тэмпературы.
Ужыванне
Вентылятар і варачная машына
Катэгорыі тавараў
-

Рухавік пераменнага току 10 кВт 96 В і зборка кантролера для г...
-

Рэактыўны рухавік з пераключэннем, які выкарыстоўваецца ў новых энергетычных ка...
-

10 кВт 72 В рухавік пераменнага току электрычны аўтамабіль пераўтварэнне аўтобуса K...
-

Часткі электрычнага сінхроннага рухавіка 1,2k 32V AC для...
-
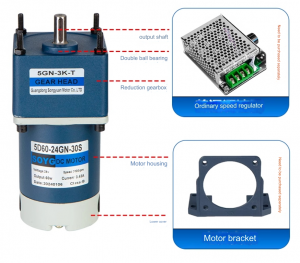
5D60-24GU-30S 12v24v DC рухавік рэдуктара
-

Часткі электрычнага сінхроннага рухавіка 1,2k 32V AC для...